This documentation corresponds to an older version of the product, is no longer updated, and may contain outdated information.
Please access the latest versions from https://cisco-tailf.gitbook.io/nso-docs and update your bookmarks. OK
Typical NSO services perform the necessary configuration by using
the create() callback, within a transaction tracking
the changes. This approach greatly simplifies service implementation,
but it also introduces some limitations.
For example, all provisioning is done at once, which may not be possible
or desired in all cases. In particular, network functions implemented
by containers or virtual machines often require provisioning in multiple
steps.
Another limitation is that the service mapping code must not produce
any side effects. Side effects are not tracked by the transaction and
therefore cannot be automatically reverted.
For example, imagine that there is an API call to allocate an IP address
from an external system as part of the create()
code.
The same code runs for every service change or a service re-deploy,
even during a commit dry-run, unless you take
special precautions.
So, a new IP address would be allocated every time, resulting in a
lot of waste, or worse, provisioning failures.
Nano services help you overcome these limitations. They implement a service as several smaller (nano) steps or stages, by using a technique called reactive FASTMAP (RFM), and provide a framework to safely execute actions with side effects. Reactive FASTMAP can also be implemented directly, using the CDB subscribers, but nano services offer a more streamlined and robust approach for staged provisioning.
The chapter starts by gradually introducing the nano service concepts
on a typical use-case. To aid readers working with nano services for
the first time, some of the finer points are omitted in this part
and discussed later on, in the section called “Implementation Reference”.
The latter is designed as a reference to aid you during implementation,
so it focuses on recapitulating the workings of nano services at the
expense of examples.
The rest of the chapter covers individual features with associated
use-cases and the complete working examples, which you may find in
the examples.ncs folder.
Services ideally perform the configuration all at once, with all
the benefits of a transaction, such as automatic rollback and cleanup
on errors. For nano services, this is not possible in the general
case.
Instead, a nano service performs as much configuration as possible
at the moment and leaves the rest for later. When an event occurs
that allows more work to be done, the nano service instance restarts
provisioning, by using a re-deploy action called
reactive-re-deploy.
It allows the service to perform additional configuration that was
not possible before. The process of automatic re-deploy, called
reactive FASTMAP, is repeated until the service is fully provisioned.
This is most evident with, for example, virtual machine (VM) provisioning, during virtual network function (VNF) orchestration. Consider a service that deploys and configures a router in a VM. When the service is first instantiated, it starts provisioning a router VM. However, it will likely take some time before the router has booted up and is ready to accept a new configuration. In turn, the service cannot configure the router just yet. The service must wait for the router to become ready. That is the event that triggers a re-deploy and the service can finish configuring the router, as the following figure illustrates:
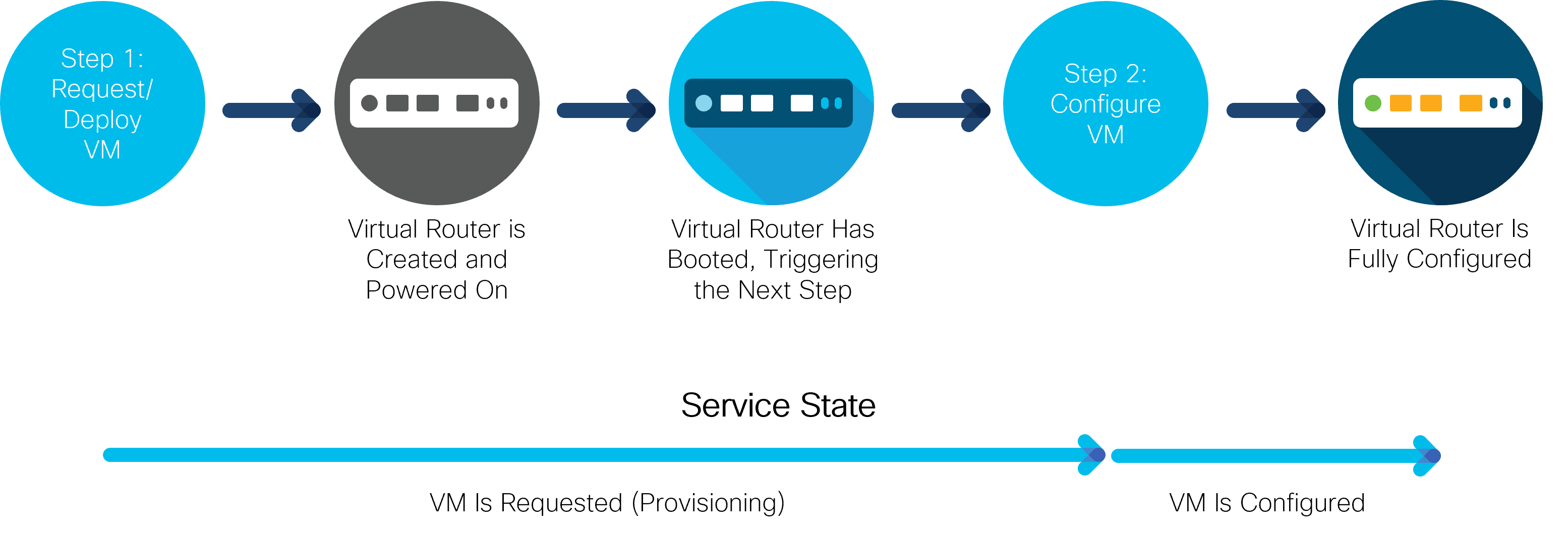
While each step of provisioning happens inside a transaction and is still atomic, the whole service is not. Instead of a simple fully-provisioned or not-provisioned-at-all status, a nano service can be in a number of other states, depending on how far in the provisioning process it is.
The figure shows that the router VM goes through multiple states internally, however, only two states are important for the service. These two are shown as arrows, in the lower part of the figure. When a new service is configured, it requests a new VM deployment. Having completed this first step, it enters the “VM is requested but still provisioning” state. In the following step, the VM is configured and so enters the second state, where the router VM is deployed and fully configured. The states obviously follow individual provisioning steps and are used to report progress. What is more, each state tracks if an error occurred during provisioning.
For these reasons, service states are central to the design of a nano service. A list of different states, their order, and transitions between them is called a plan outline and governs the service behavior.
By default, the plan outline consists of a single
component, the self component, with
the two states init and ready. It can be used to track the progress of
the service as a whole.
You can add any number of additional components and states to form the
nano service.
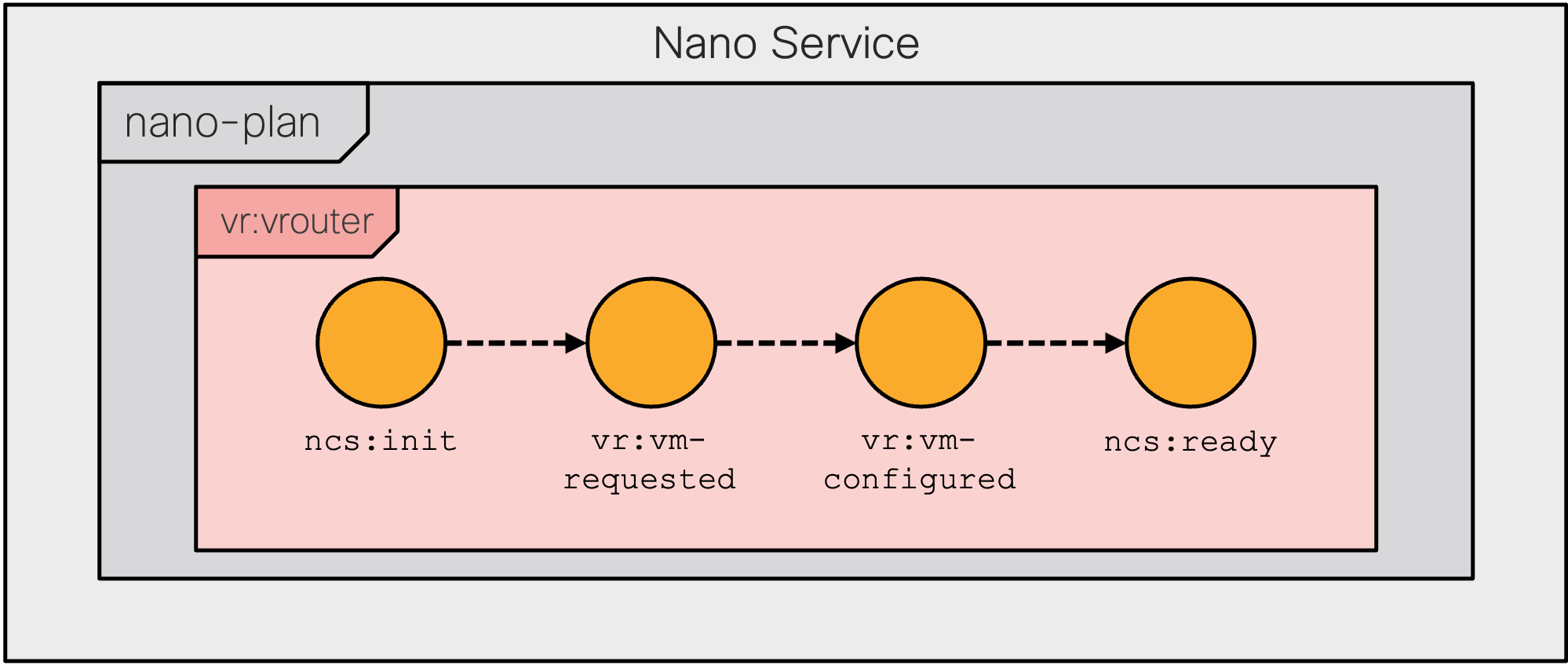
The following YANG snippet, also part of the examples.ncs/development-guide/nano-services/basic-vrouter example, shows a plan outline with the two VM-provisioning states presented above:
module vrouter {
prefix vr;
identity vm-requested {
base ncs:plan-state;
}
identity vm-configured {
base ncs:plan-state;
}
identity vrouter {
base ncs:plan-component-type;
}
ncs:plan-outline vrouter-plan {
description "Plan for configuring a VM-based router";
ncs:component-type "vr:vrouter" {
ncs:state "vr:vm-requested";
ncs:state "vr:vm-configured";
}
}
}
The first part contains a definition of states as identities,
deriving from the ncs:plan-state base. These identities
are then used with the ncs:plan-outline, inside an
ncs:component-type statement. It is customary to use past
tense for state names, for example “configured-vm” or
“vm-configured” instead of “configure-vm”
and “configuring-vm.”
At present, the plan contains one component and two states but no logic. If you wish to do any provisioning for a state, the state must declare a special nano create callback, otherwise, it just acts as a checkpoint. The nano create callback is similar to an ordinary create service callback, allowing service code or templates to perform configuration. To add a callback for a state, extend the definition in the plan outline:
ncs:state "vr:vm-requested" {
ncs:create {
ncs:nano-callback;
}
}
The service automatically enters each state one by one when a new
service instance is configured. However, for the
“vm-configured” state, the service should wait until
the router VM has had the time to boot and is ready to accept
a new configuration.
An ncs:pre-condition statement in YANG provides this
functionality. Until the condition becomes fulfilled, the service
will not advance to that state.
The following YANG code instructs the nano service to check the
value of the vm-up-and-running leaf, before entering
and performing the configuration for a state.
ncs:state "vr:vm-configured" {
ncs:create {
ncs:nano-callback;
ncs:pre-condition {
ncs:monitor "$SERVICE" {
ncs:trigger-expr "vm-up-and-running = 'true'";
}
}
}
}The main reason for defining multiple nano service states is to specify what part of the overall configuration belongs in each state. For the VM-router example, that entails splitting the configuration into a part for deploying a VM on a virtual infrastructure and a part for configuring it. In this case, a router VM is requested simply by adding an entry to a list of VM requests, while making the API calls is left to an external component, such as the VNF Manager.
If a state defines a nano callback, you can register a configuration
template to it. The XML template file is very similar to an ordinary
service template but requires the additional
componenttype and
state attributes in the
config-template root element.
These attributes identify which component and state in the plan
outline the template belongs to, for example:
<config-template xmlns="http://tail-f.com/ns/config/1.0" servicepoint="vrouter-servicepoint" componenttype="vr:vrouter" state="vr:vm-configured"> <devices xmlns="http://tail-f.com/ns/ncs"> <!-- ... --> </devices> </config-template>
Likewise, you can implement a callback in the service code. The registration requires you to specify the component and state, as the following Python example demonstrates:
class NanoApp(ncs.application.Application):
def setup(self):
self.register_nano_service('vrouter-servicepoint', # Service point
'vr:vrouter', # Component
'vr:vm-requested', # State
NanoServiceCallbacks)
The selected NanoServiceCallbacks class
then receives callbacks in the cb_nano_create()
function:
class NanoServiceCallbacks(ncs.application.NanoService):
@ncs.application.NanoService.create
def cb_nano_create(self, tctx, root, service, plan, component, state,
proplist, component_proplist):
...
The component and state
parameters allow the function to distinguish calls for different
callbacks when registered for more than one.
For most flexibility, each state defines a separate callback, allowing you to implement some with a template and others with code, all as part of the same service. You may even use Java instead of Python, as explained in the section called “Nano Service Callbacks”.
The set of states used in the plan outline describe the stages that a service instance goes through during provisioning. Naturally, these are service-specific, which presents a problem if you just want to tell whether a service instance is still provisioning or has already finished. It requires the knowledge of which state is the last, final one, making it hard to check in a generic way.
That is why each service component must have the built-in
ncs:init state as the first state and
ncs:ready as the last state.
Using the two built-in states allows for interoperability with
other services and tools. The following is a complete four-state
plan outline for the VM-based router service, with the two states
added:
ncs:plan-outline vrouter-plan {
description "Plan for configuring a VM-based router";
ncs:component-type "vr:vrouter" {
ncs:state "ncs:init";
ncs:state "vr:vm-requested" {
ncs:create {
ncs:nano-callback;
}
}
ncs:state "vr:vm-configured" {
ncs:create {
ncs:nano-callback;
ncs:pre-condition {
ncs:monitor "$SERVICE" {
ncs:trigger-expr "vm-up-and-running = 'true'";
}
}
}
}
ncs:state "ncs:ready";
}
}For the service to use it, the plan outline must be linked to a service point with the help of a behavior tree. The main purpose of a behavior tree is to allow a service to dynamically instantiate components, based on service parameters. Dynamic instantiation is not always required and the behavior tree for a basic, static, single-component scenario boils down to the following:
ncs:service-behavior-tree vrouter-servicepoint {
description "A static, single component behavior tree";
ncs:plan-outline-ref "vr:vrouter-plan";
ncs:selector {
ncs:create-component "'vrouter'" {
ncs:component-type-ref "vr:vrouter";
}
}
}
This behavior tree always creates a single “vrouter”
component for the service. The service point is provided as an
argument to the ncs:service-behavior-tree statement,
while the ncs:plan-outline-ref statement provides
the name for the plan outline to use.
The following figure visualizes the resulting service plan and its states.
Along with the behavior tree, a nano service also relies on the
ncs:nano-plan-data grouping in its service model. It
is responsible for storing state and other provisioning details
for each service instance. Other than that, the nano service model
follows the standard YANG definition of a service:
list vrouter {
description "Trivial VM-based router nano service";
uses ncs:nano-plan-data;
uses ncs:service-data;
ncs:servicepoint vrouter-servicepoint;
key name;
leaf name {
type string;
}
leaf vm-up-and-running {
type boolean;
config false;
}
}
This model includes the operational vm-up-and-running
leaf, that the example plan outline depends on. In practice, however,
a plan outline is more likely to reference values provided by
another part of the system, such as the actual, externally provided,
state of the provisioned VM.
A nano service does not directly use its service point for configuration. Instead, the service point invokes a behavior tree to generate a plan, and the service starts executing according to this plan. As it reaches a certain state, it performs the relevant configuration for that state.
For example, when you create a new instance of the VM-router service,
the vm-up-and-running leaf is not set, so only the first
part of the service runs. Inspecting the service instance plan
reveals the following:
admin@ncs# show vrouter vr-01 plan
POST
BACK ACTION
TYPE NAME TRACK GOAL STATE STATUS WHEN ref STATUS
---------------------------------------------------------------------------------------------
self self false - init reached 2023-08-11T07:45:20 - -
ready not-reached - - -
vrouter vrouter false - init reached 2023-08-11T07:45:20 - -
vm-requested reached 2023-08-11T07:45:20 - -
vm-configured not-reached - - -
ready not-reached - - -Since neither the “init” nor the “vm-requested” states have any pre-conditions, they are reached right away. In fact, NSO can optimize it into a single transaction (this behavior can be disabled if you use forced commits, discussed later on).
But the process has stopped at the “vm-configured”
state, denoted by the not-reached status in
the output. It is waiting for the pre-condition to become fulfilled
with the help of a kicker.
The job of the kicker is to watch the value and perform an action,
the reactive re-deploy, when the conditions are satisfied. The kickers
are managed by the nano service subsystem: when an unsatisfied
precondition is encountered, a kicker is configured, and when the
precondition becomes satisfied, the kicker is removed.
You may also verify, through the get-modifications
action, that only the first part, the creation of the VM, was
performed:
admin@ncs# vrouter vr-01 get-modifications
cli {
local-node {
data +vm-instance vr-01 {
+ type csr-small;
+}
}
}
At the same time, a kicker was installed under the kickers
container but you may need to use the unhide debug
command to inspect it. More information on kickers in general
is available in Kicker .
At a later point in time, the router VM becomes ready, and the
vm-up-and-running leaf is set to a true
value. The installed kicker notices the change and automatically
calls the reactive-re-deploy action on the service instance.
In turn, the service gets fully deployed.
admin@ncs# show vrouter vr-01 plan
POST
BACK ACTION
TYPE NAME TRACK GOAL STATE STATUS WHEN ref STATUS
-----------------------------------------------------------------------------------------
self self false - init reached 2023-08-11T07:45:20 - -
ready reached 2023-08-11T07:47:36 - -
vrouter vrouter false - init reached 2023-08-11T07:45:20 - -
vm-requested reached 2023-08-11T07:45:20 - -
vm-configured reached 2023-08-11T07:47:36 - -
ready reached 2023-08-11T07:47:36 - -The get-modifications output confirms this fact. It contains the additional IP address configuration, performed as part of the “vm-configured” step:
admin@ncs# vrouter vr-01 get-modifications
cli {
local-node {
data +vm-instance vr-01 {
+ type csr-small;
+ address 198.51.100.1;
+}
}
}The “ready” state has no additional pre-conditions, allowing NSO to reach it along with the “vm-configured” state. This effectively breaks the provisioning process into two steps. To break it down further, simply add more states with corresponding pre-conditions and create logic.
Other than staged provisioning, nano services act the same as other services, allowing you to use the service check-sync and similar actions, for example. But please note the un-deploy and re-deploy actions may behave differently than expected, as they deal with provisioning. Chiefly, a re-deploy reevaluates the pre-conditions, possibly generating a different configuration if a pre-condition depends on operational values that have changed. The un-deploy action, on the other hand, removes all of the recorded modifications, along with the generated plan.
Every service in NSO has a YANG definition of the service
parameters, a service point name, and an implementation of the
service point create() callback.
Normally, when a service is committed, the FASTMAP algorithm removes
all previous data changes internally, and presents the service
data to the create() callback as if this was the
initial create.
When the create() callback returns, the FASTMAP algorithm
compares the result and calculates a reverse diff-set from the
data changes. This reverse diff-set contains the operations that
are needed to restore the configuration data to the state as it
was before the service was created. The reverse diff-set is required,
for instance, if the service is deleted or modified.
This fundamental principle is what makes the implementation of
services and the create() callback simple. In turn,
a lot of the NSO functionality relies on this mechanism.
However, in the reactive FASTMAP pattern the create()
callback is re-entered several times by using the subsequent
reactive-re-deploy calls. Storing all changes in a
single reverse diff-set then becomes an impediment. For instance,
if a staged delete is necessary, there is no way to single out
which changes has each RFM step performed.
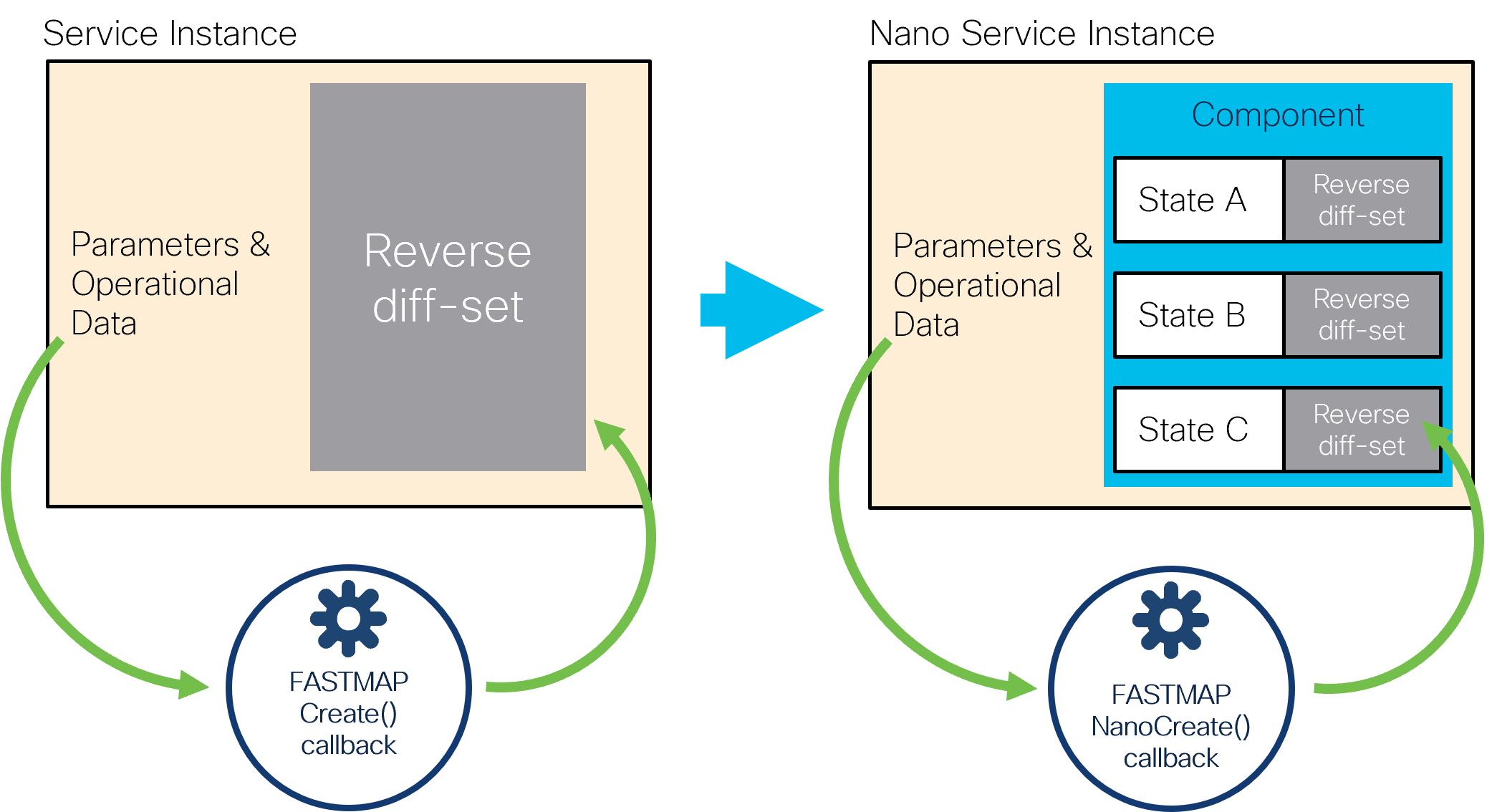
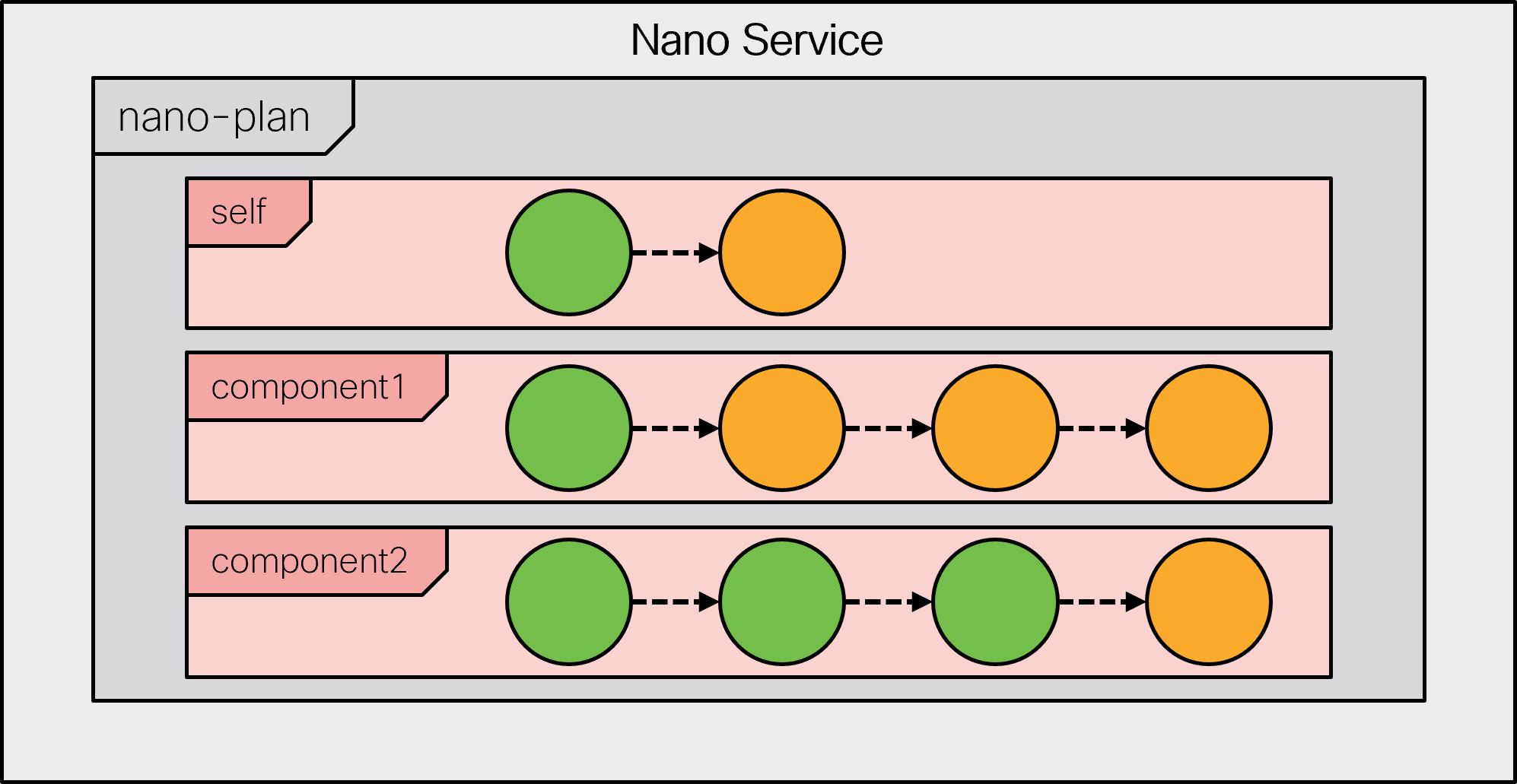
A nano service abandons the single reverse diff-set by introducing
nano-plan-data and a new NanoCreate()
callback.
The nano-plan-data YANG grouping represents an executable
plan that the system can follow to provision the service.
It has additional storage for reverse diff-set and pre-conditions
per state, for each component of the plan.
This is illustrated in the following figure:
You can still use the service get-modifications action
to visualize all data changes performed by the service as an
aggregate.
In addition, each state also has its own get-modifications
action that visualizes the data-changes for that particular state.
It allows you to more easily identify the state and, by extension,
the code that produced those changes.
Before nano services became available, RFM services could only be
implemented by creating a CDB subscriber. With the subscriber approach,
the service can still leverage the plan-data
grouping, which nano-plan-data is based on,
to report the progress of the service under the resulting
plan container.
But the create() callback becomes responsible for creating
the plan components, their states, and setting the status of the
individual states as the service creation progresses.
Moreover, implementing a staged delete with a subscriber often requires
keeping the configuration data outside of the service. The code
is then distributed between the service create() callback
and the correlated CDB subscriber.
This all results in several sources which potentially contain errors
that are complicated to track down. Nano services, on the other hand,
do not require any use of CDB subscribers or other mechanisms outside
of the service code itself to support the full service life cycle.
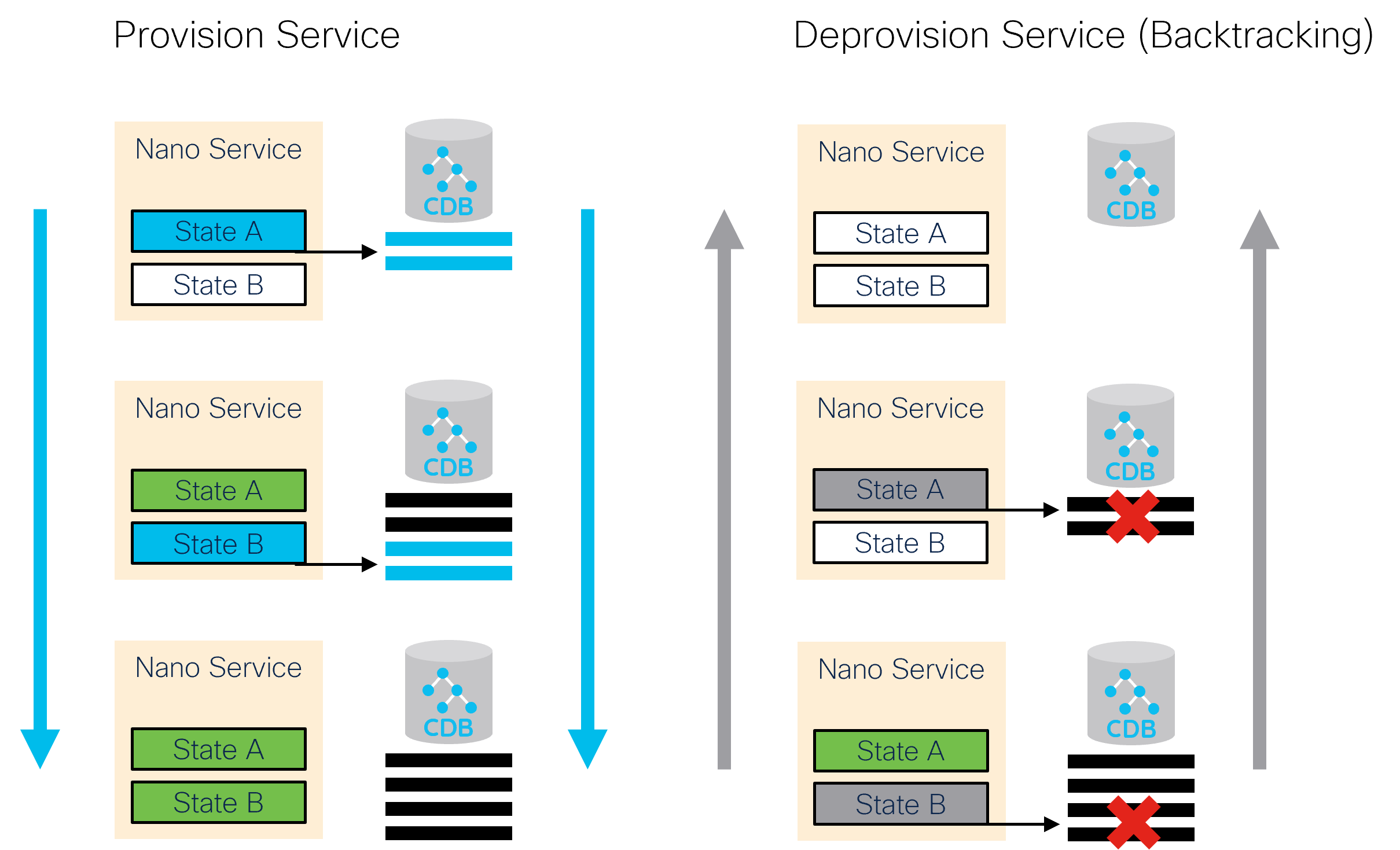
Resource deprovisioning is an important part of the service life cycle. The FASTMAP algorithm ensures that no longer needed configuration changes in NSO are removed automatically but that may be insufficient by itself. For example, consider the case of a VM-based router, such as the one described earlier. Perhaps provisioning of the router also involves assigning a license from a central system to the VM and that license must be returned when the VM is decommissioned. If releasing the license must be done by the VM itself, simply destroying it will not work.
Another example is management of a web server VM for a web application. Here, each VM is part of a larger pool of servers behind a load balancer that routes client requests to these servers. During deprovisioning, simply stopping the VM interrupts the currently processing requests and results in client timeouts. This can be avoided with a graceful shutdown, which stops the load balancer from sending new connections to the server and waits for the current ones to finish, before removing the VM.
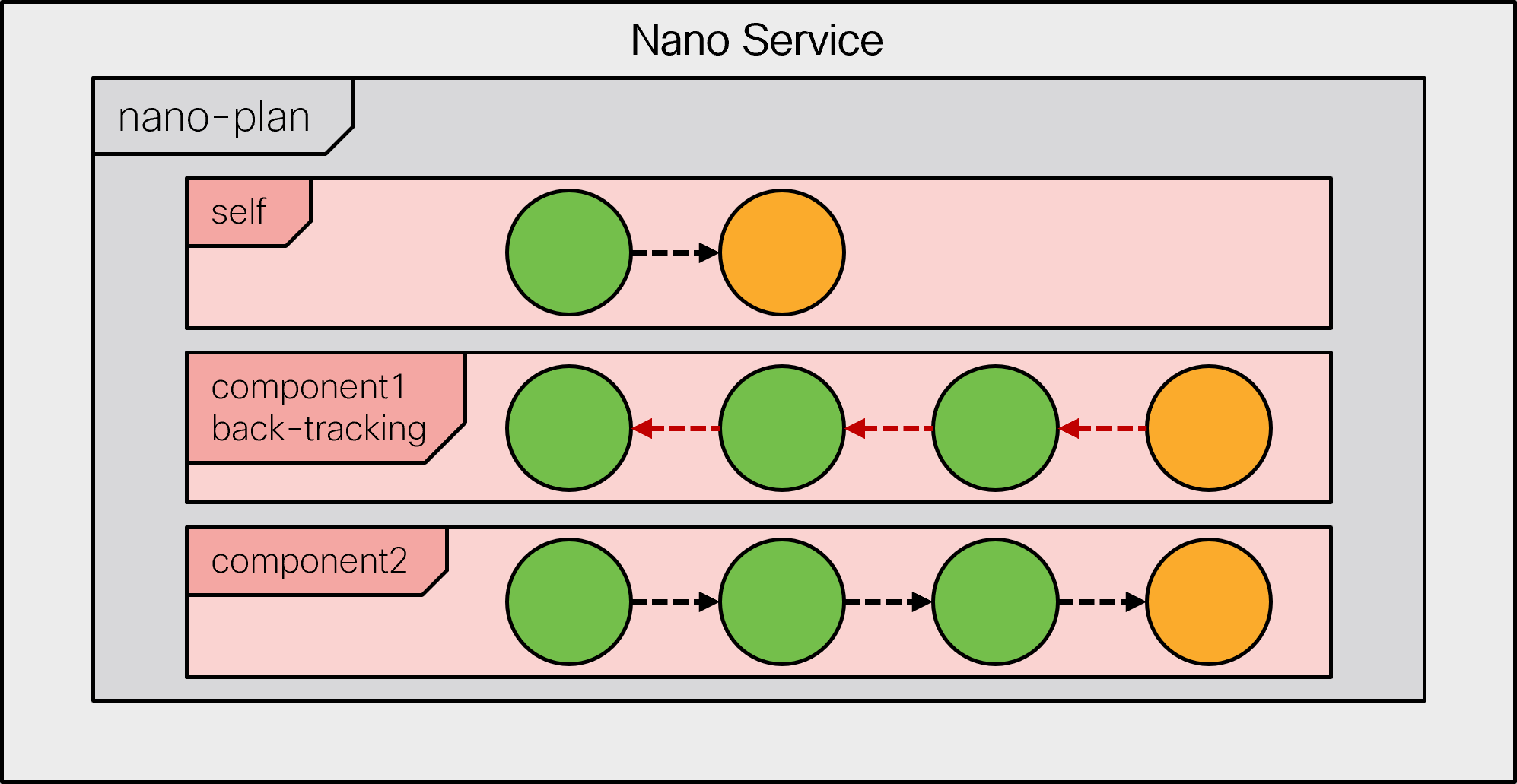
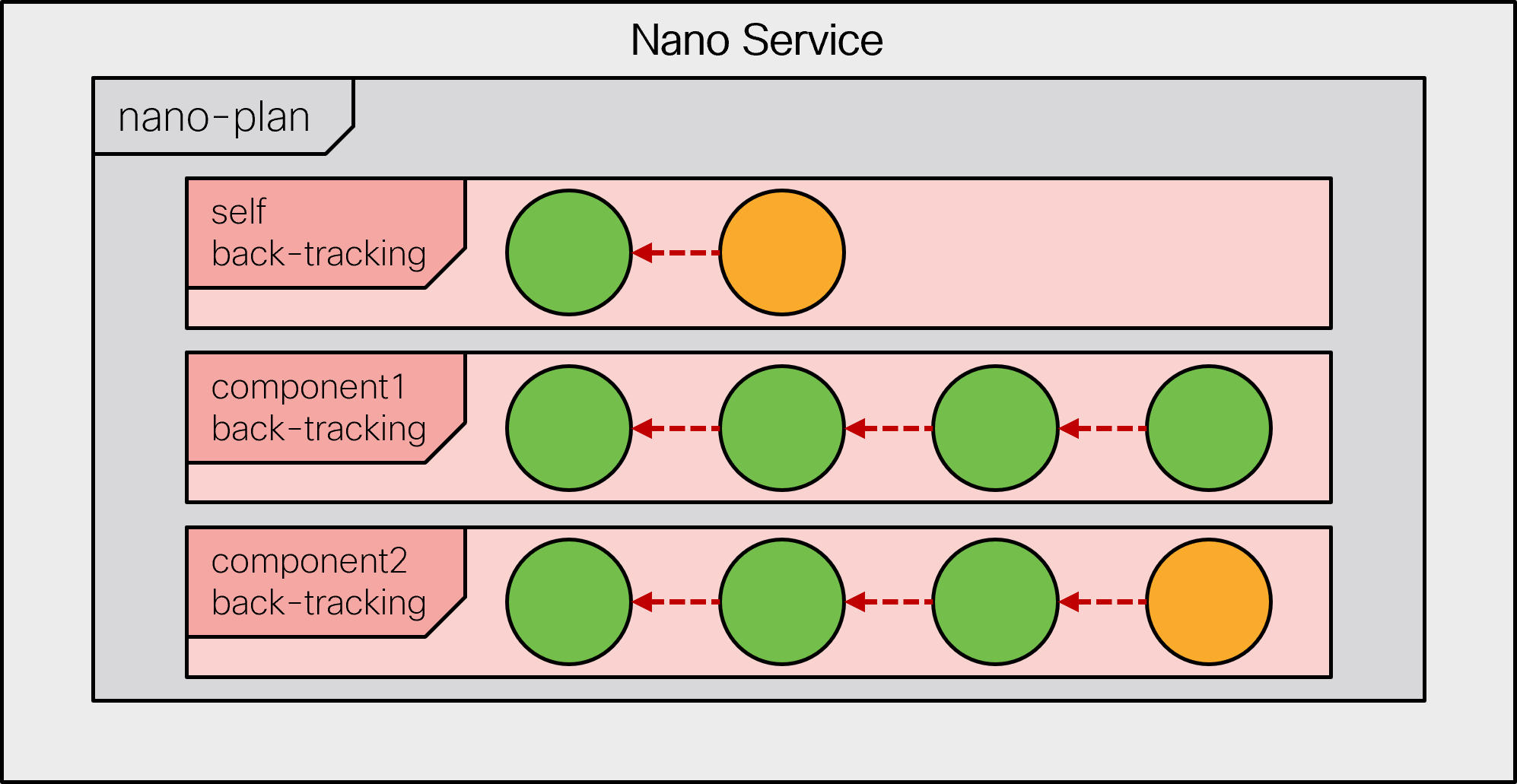
Both examples require two distinct steps for deprovisioning. Can nano services be of help in this case? Certainly. In addition to the state-by-state provisioning of the defined components, the nano service system in NSO is responsible for back-tracking during their removal. This process traverses all reached states in the reverse order, removing the changes previously done for each state one by one.
In doing so, the back-tracking process checks for a delete pre-condition of a state. A delete pre-condition is similar to the create pre-condition, but only relevant when back-tracking. If the condition is not fulfilled, the back-tracking process stops and waits until it becomes satisfied. Behind the scenes, a kicker is configured to restart the process when that happens.
If the state's delete pre-condition is fulfilled, back-tracking
first removes the state's create changes recorded by FASTMAP and
then invokes the nano delete() callback, if defined.
The main use of the callback is to override or veto the default
status calculation for a back-tracking state. That is why you can't
implement the delete() callback with a template, for
example.
Very importantly, delete() changes are not kept in
a service's reverse diff-set and may stay even after the service
is completely removed. In general, you are advised to avoid writing
any configuration data because this callback is called under a removal
phase of a plan component where new configuration is seldom expected.
Since the “create” configuration is automatically removed,
without the need for a separate delete() callback,
these callbacks are used only in specific cases and are not very
common. Regardless, the delete() callback may run as
part of the commit dry-run command, so it must
not invoke further actions or cause side effects.
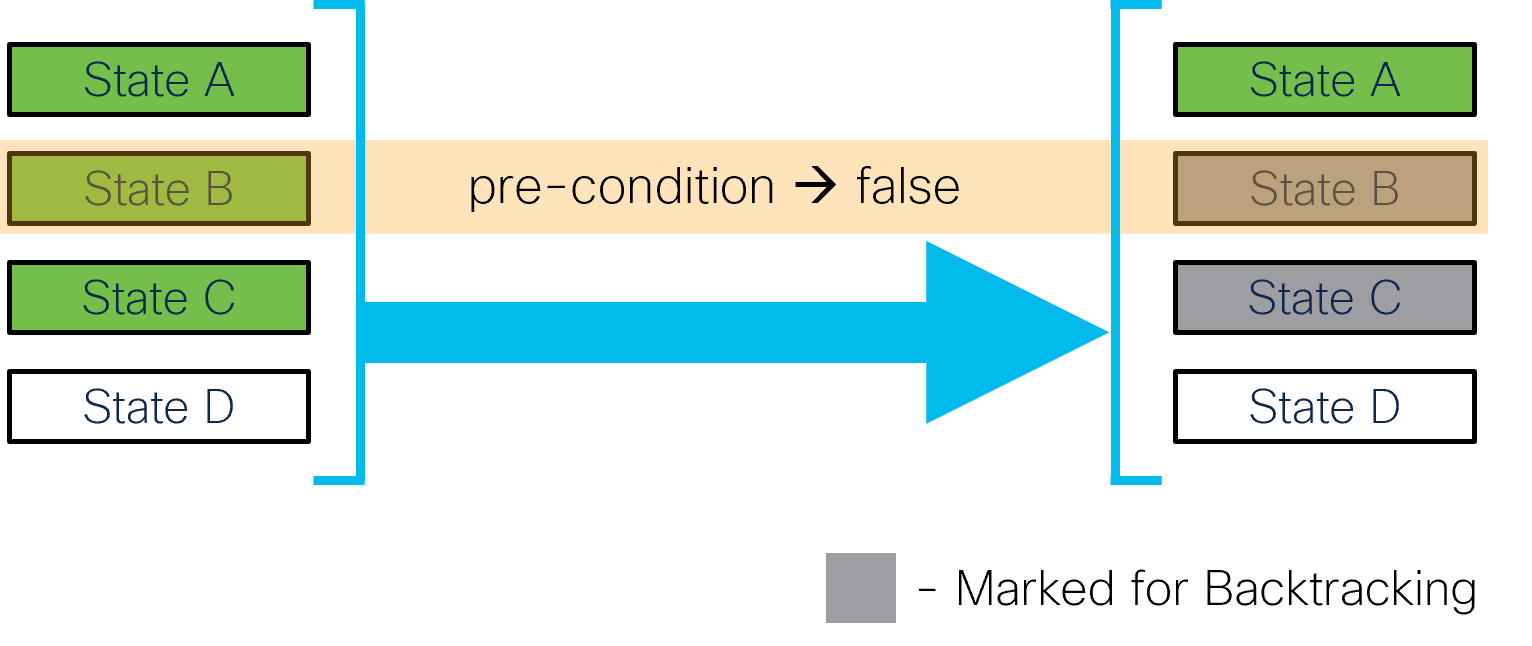
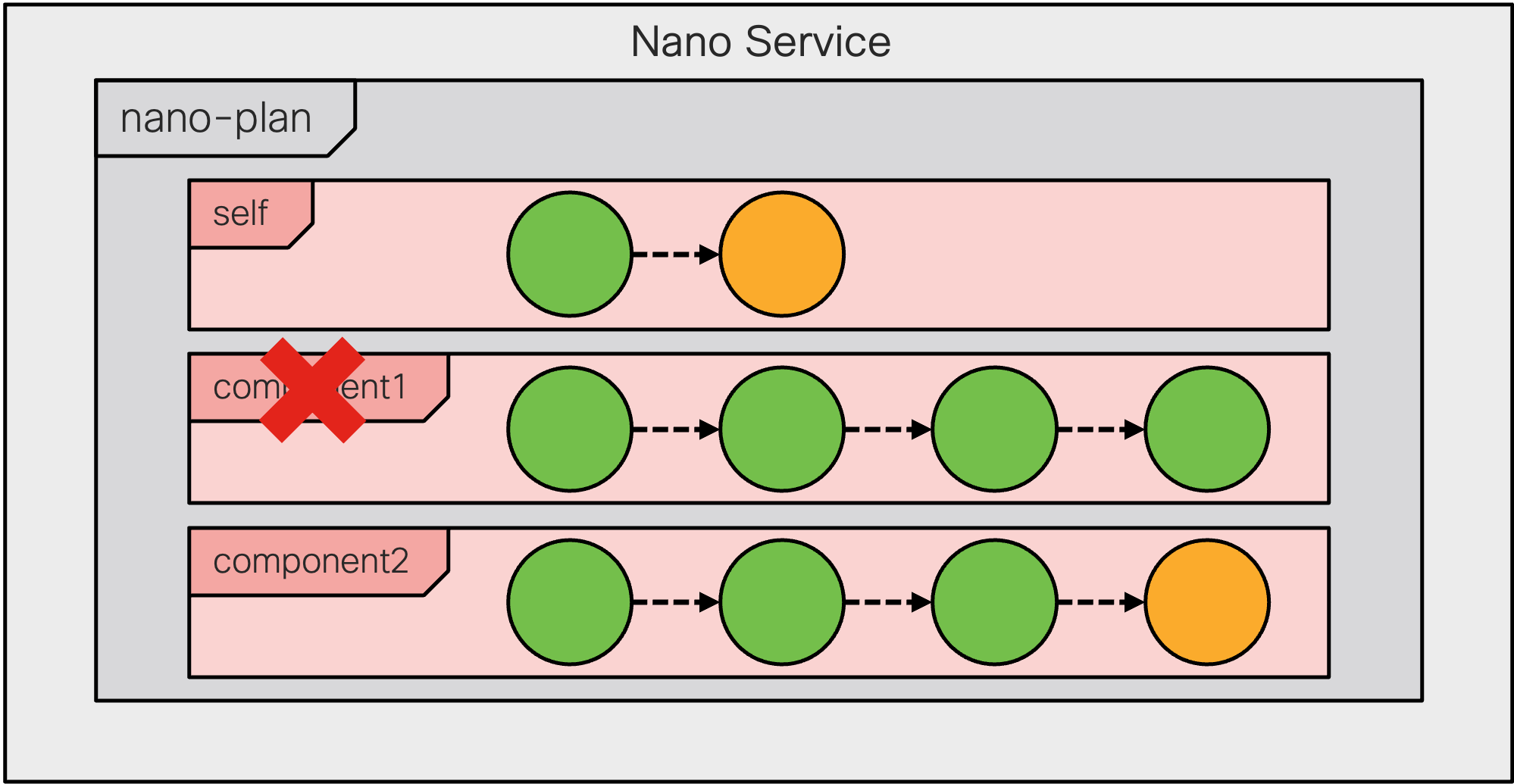
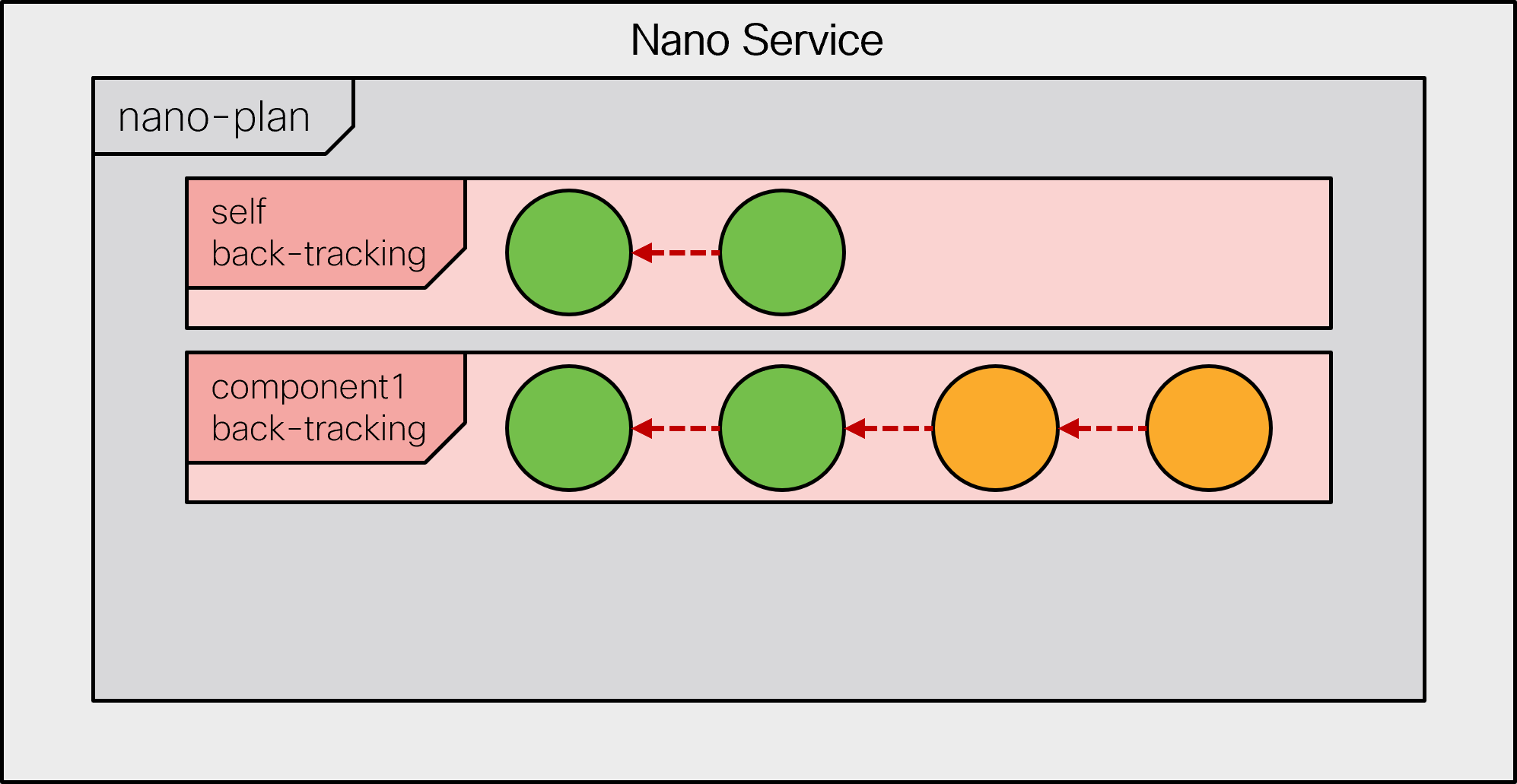
Backtracking is invoked when a component of a nano service is removed, such as when deleting a service. It is also invoked when evaluating a plan and a reached state's create pre-condition is no longer satisfied. In this case, the affected component is temporarily set to back-tracking mode for as long as it contains such nonconforming states. It allows the service to recover and return to a well-defined state.
To implement the delete pre-condition or the delete()
callback, you must add the ncs:delete statement to
the relevant state in the plan outline. Applying it to the web server
example above, you might have:
ncs:state "vr:vm-requested" {
ncs:create { ... }
ncs:delete {
ncs:pre-condition {
ncs:monitor "$SERVICE" {
ncs:trigger-expr "requests-in-processing = '0'";
}
}
}
}
ncs:state "vr:vm-configured" {
ncs:create { ... }
ncs:delete {
ncs:nano-callback;
}
}
While, in general, the delete() callback should not
produce any configuration, the graceful shutdown scenario is one
of the few exceptional cases where this may be required.
Here, the delete() callback allows you to re-configure
the load balancer to remove the server from actively accepting new
connections, such as marking it “under maintenance.”
The delete pre-condition allows you to further delay the VM removal
until the ongoing requests are completed.
Similar to the create() callback, the
ncs:nano-callback statement instructs NSO to
also process a delete() callback. A Python class that
you have registered for the nano service must then implement the
following method:
@NanoService.delete
def cb_nano_delete(self, tctx, root, service, plan, component, state,
proplist, component_proplist):
...
As explained, there are some uncommon cases where additional
configuration with the delete() callback is required.
However, a more frequent use of the ncs:delete statement
is in combination with side-effect actions.
In some scenarios, side effects are an integral part of the provisioning
process and cannot be avoided. The aforementioned example on license
management may require calling a specific device action. Even so,
the create() or delete() callbacks, nano
service or otherwise, are a bad fit for such work.
Since these callbacks are invoked during the transaction commit,
no RPCs or other access outside of the NSO datastore are allowed.
If allowed, they would break the core NSO functionality, such
as a dry-run, where side-effects are not expected.
A common solution is to perform these actions outside of the
configuration transaction. Nano services provide this functionality
through the post-actions mechanism, using
a post-action-node statement for a state. It is a
definition of an action that should be invoked after the state has
been reached and the commit performed. To ensure the latter, NSO
will commit the current transaction before executing the post-action
and advancing to the next state.
The service's plan state data also carries a
post-action-status leaf, which reflects whether
the action was executed and if it was successful. The leaf will
be set to not-reached, create-reached,
delete-reached, or failed, depending on
the case and result.
If the action is still executing, then the leaf will show either
a create-init or delete-init status
instead.
Moreover, post actions can be run either asynchronously (default)
or synchronously. To run them synchronously, add a sync
statement to the post-action statement. When a post action is run
asynchronously, further states will not wait for the action to finish,
unless you define an explicit post-action-status
precondition.
While for a synchronous post action, later states in the same component
will be invoked only after the post action is run successfully.
The exception to this setting is when a component switches to a backtracking mode. In that case, the system will not wait for any create post action to complete (synchronous or not) but will start executing backtracking right away. It means a delete callback or a delete post action for a state may run before its synchronous create post action has finished executing.
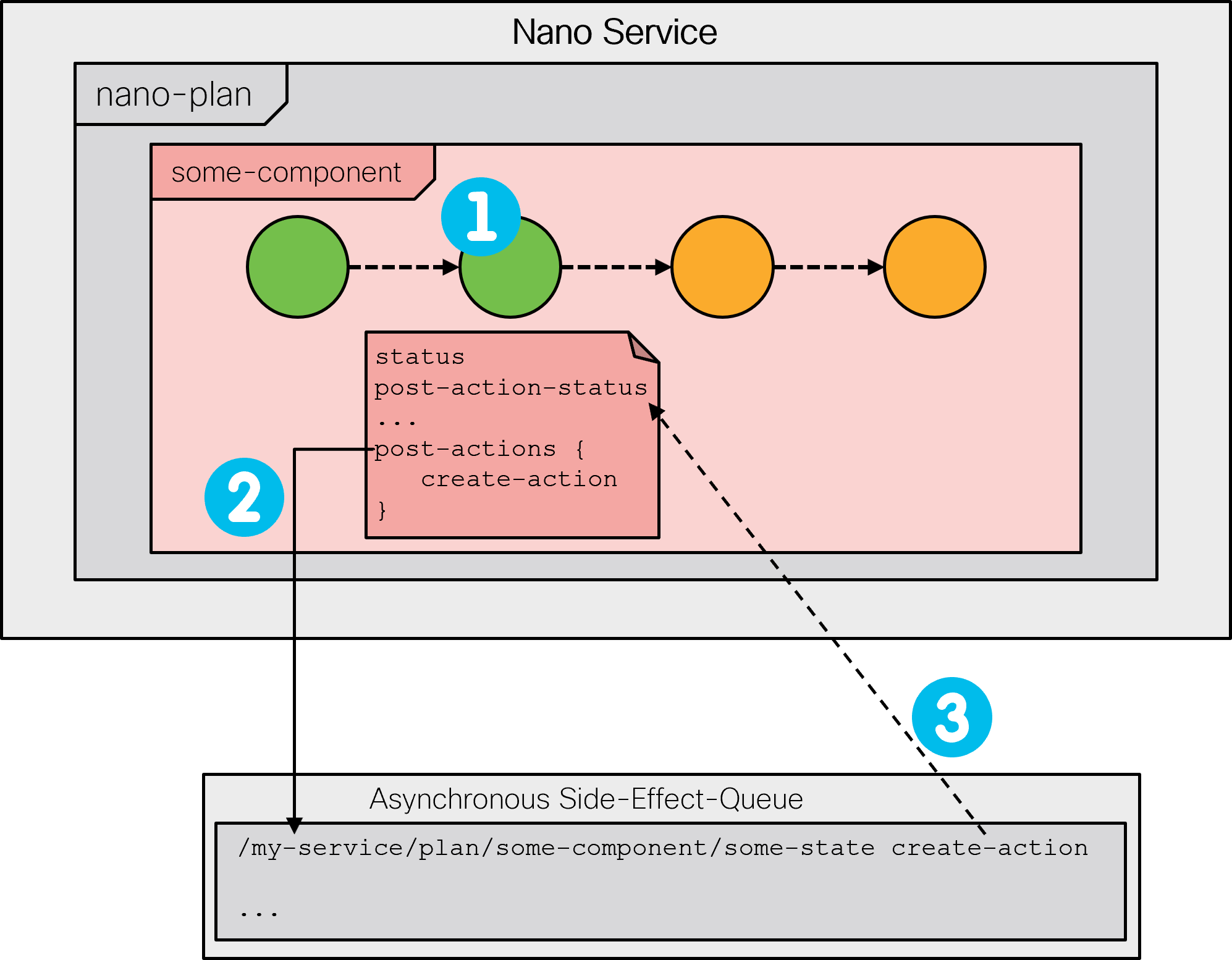
The side-effect-queue and a corresponding kicker are responsible for invoking the actions on behalf of the nano service and reporting the result in the respective state's post-action-status leaf. The following figure shows an entry is made in the side-effect-queue (2) after the state is reached (1) and its post-action-status is updated (3) once the action finishes executing.
You can use the show side-effect-queue command
to inspect the queue. The queue will run multiple actions in parallel
and keep the failed ones for you to inspect.
Please note that High Availability (HA) setups
require special consideration: the side effect queue is disabled
when High Availability is enabled and the High Availability mode is
NONE. See the section called “Mode of operation” in Administration Guide for more details.
In case of a failure, a post action sets the post-action-status
accordingly and, if the action is synchronous, the nano service
stops progressing. To retry the failed action, you can perform
the action reschedule.
$ ncs_cli -u admin admin@ncs>show side-effect-queue side-effect statusID STATUS ------------ 2 failed [ok][2023-08-15 11:01:10] admin@ncs>request side-effect-queue side-effect 2 rescheduleside-effect-id 2 [ok][2023-08-15 11:01:18]
Or execute a (reactive) re-deploy, which will also restart the nano service if it was stopped.
Using the post-action mechanism, it is possible to define side effects
for a nano service in a safe way. A post-action is only executed
one time. That is, if the post-action-status is already at the
create-reached in the create case or
delete-reached in the delete case, then new calls of
the post-actions are suppressed. In dry-run operations, post-actions
are never called.
These properties make post actions useful in a number of scenarios. A widely applicable use case is invoking a service self-test as part of initial service provisioning.
Another example, requiring the use of post-actions, is the IP address
allocation scenario from the chapter introduction. By its nature,
the allocation or assignment call produces a side effect in an external
system: it marks the assigned IP address in use. The same is true
for releasing the address.
Since NSO doesn't know how to reverse these effects on its
own, they can't be part of any create() callback. Instead,
the API calls can be implemented as post-actions.
The following snippet of a plan outline defines a create and delete post-action to handle IP management:
ncs:state "ncs:init" {
ncs:create {
ncs:post-action-node "$SERVICE" {
ncs:action-name "allocate-ip";
ncs:sync;
}
}
}
ncs:state "vr:ip-allocated" {
ncs:delete {
ncs:post-action-node "$SERVICE" {
ncs:action-name "release-ip";
}
}
}
Let's see how this plan manifests during provisioning. After the
first (init) state is reached and committed, it fires off an allocation
action on the service instance, called allocate-ip.
The job of the allocate-ip action is to communicate with
the external system, the IP Address Management (IPAM), and allocate
an address for the service instance.
This process may take a while, however it does not tie up NSO,
since it runs outside of the configuration transaction and other
configuration sessions can proceed in the meantime.
The $SERVICE XPath variable is automatically populated
by the system and allows you to easily reference the service instance.
There are other automatic variables defined. You can find the
complete list inside the tailf-ncs-plan.yang
submodule, in the $NCS_DIR/src/ncs/yang/ folder.
Due to the ncs:sync statement, service provisioning
can continue only after the allocation process (the action) completes.
Once that happens, the service resumes processing in the ip-allocated
state, with the IP value now available for configuration.
On service deprovisioning, the back-tracking mechanism works backwards
through the states. When it is the ip-allocated state's turn to
deprovision, NSO reverts any configuration done as part of
this state, and then runs the release-ip action, defined
inside the ncs:delete block.
Of course, this only happens if the state previously had a reached
status. Implemented as a post-action, release-ip can
safely use the external IPAM API to deallocate the IP address, without
impacting other sessions.
The actions, as defined in the example, do not take any parameters.
When needed, you may pass additional parameters from the service's
opaque and component_proplist object.
These parameters must be set in advance, for example in some previous
create callback. For details, please refer to the YANG definition
of post-action-input-params in the
tailf-ncs-plan.yang file.
The discussion on basic concepts briefly mentions the role of a nano behavior tree but it does not fully explore its potential. Let's now consider in which situations you may find a non-trivial behavior tree beneficial.
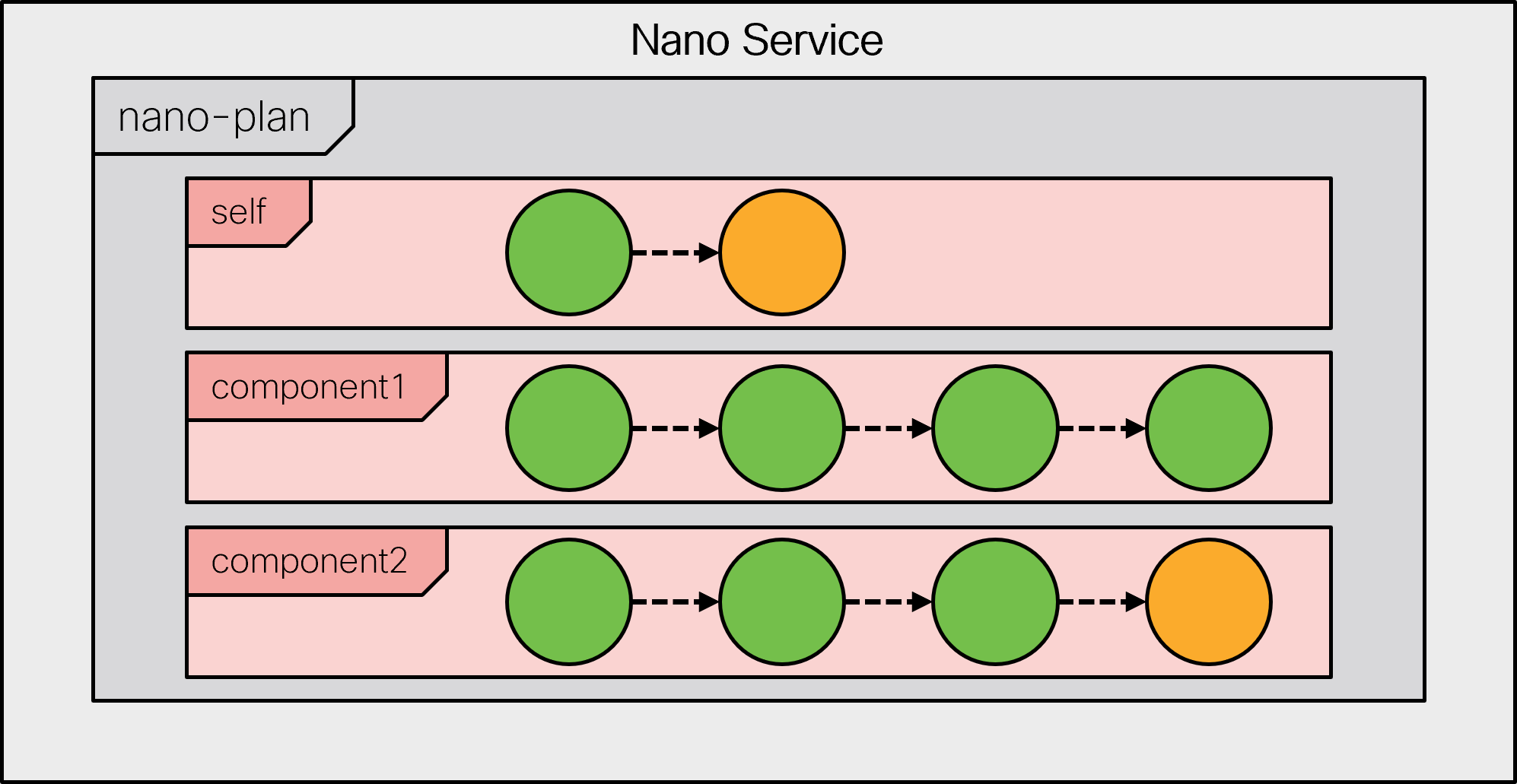
Suppose you are implementing a service that requires not one but two VMs. While you can always add more states to the component, these states are processed sequentially. However, you might want to provision the two VMs in parallel, since they take a comparatively long time, and it makes little sense having to wait until the first one is finished before starting with the second one. Nano services provide an elegant solution to this challenge in the form of multiple plan components: provisioning of each VM can be tracked by a separate plan component, allowing the two to advance independently, in parallel.
If the two VMs go through the same states, you can use a single component-type in the plan outline for both. It is the job of the behavior tree to create or synthesize actual components for each service instance. Therefore, you could use a behavior tree similar to the following example:
ncs:service-behavior-tree multirouter-servicepoint {
description "A 2-VM behavior tree";
ncs:plan-outline-ref "vr:multirouter-plan";
ncs:selector {
ncs:create-component "'vm1'" {
ncs:component-type-ref "vr:router-vm";
}
ncs:create-component "'vm2'" {
ncs:component-type-ref "vr:router-vm";
}
}
}
The two ncs:create-component statements instruct NSO
to create two components, named vm1 and
vm2, of the same vr:router-vm
type. Note the required use of single quotes around component names,
because the value is actually an XPath expression.
The quotes ensure the name is used verbatim when the expression
is evaluated.
With multiple components in place, the implicit self
component reflects the cumulative status of the service. The ready state
of the self component will never have its status set to reached until all
other components have the ready state status set to reached and all post
actions have been run, too. Likewise, during backtracking, the init state
will never be set to “not-reached” until all other
components have been fully backtracked and all delete post actions have
been run.
Additionally, the self ready or init state status will be set to
failed if any other state has a failed status or a failed post action,
thus signaling that something has failed while executing the service
instance.
As you can see, all the ncs:create-component statements
are placed inside an ncs:selector block. A selector
is a so-called control flow node. It selects
a group of components and allows you to decide whether they are
created or not, based on a pre-condition.
The pre-condition can reference a service parameter, which in turn
controls if the relevant components are provisioned for this service
instance. The mechanism enables you to dynamically produce just
the necessary plan components.
The pre-condition is not very useful on the top selector node, but
selectors can also be nested. For example, having a
use-virtual-devices configuration leaf in the service
YANG model, you could modify the behavior tree to the following:
ncs:service-behavior-tree multirouter-servicepoint {
description "A conditional 2-VM behavior tree";
ncs:plan-outline-ref "vr:multirouter-plan";
ncs:selector {
ncs:create-component "'router'" { ... }
ncs:selector {
ncs:pre-condition {
ncs:monitor "$SERVICE" {
ncs:trigger-expr "use-virtual-devices = 'true'";
}
}
ncs:create-component "'vm1'" { ... }
ncs:create-component "'vm2'" { ... }
}
}
}
The described behavior tree always synthesizes the router component
and evaluates the child selector. However, the child selector only
synthesizes the two VM components if the service configuration requested
so by setting the use-virtual-devices to
true.
What is more, if the pre-condition value changes, the system re-evaluates the behavior tree and starts the backtracking operation for any removed components.
For even more complex cases, where a variable number of components
needs to be synthesized, the ncs:multiplier control
flow node becomes useful.
Its ncs:foreach statement selects a set of elements
and each element is processed in the following way:
-
If the optional
whenstatement is not satisfied, the element is skipped. -
All
variablestatements are evaluated as XPath expressions for this element, to produce a unique name for the component and any other element-specific values. -
All
ncs:create-componentand other control flow nodes are processed, creating the necessary components for this element.
The multiplier node is often used to create a component for each
item in a list. For example, if the service model contains a list
of VMs, with a key name, then the following code creates
a component for each of the items:
ncs:multiplier {
ncs:foreach "vms" {
ncs:variable "NAME" {
ncs:value-expr "concat('vm-', name)";
}
ncs:create-component "$NAME" { ... }
}
}
In this particular case it might be possible to avoid the variable
altogether, by using the expression for the create-component
statement directly.
However, defining a variable also makes it available to service
create() callbacks.
This is extremely useful, since you can access these values, as well as the ones from the service opaque object, directly in the nano service XML templates. The opaque, especially, allows you to separate the logic in code from applying the XML templates.
The examples.ncs/development-guide/nano-services/netsim-vrouter
folder contains a complete implementation of a service that provisions
a netsim device instance, onboards it to NSO, and pushes a sample
interface configuration to the device.
Netsim device creation is neither instantaneous nor side-effect free,
and thus requires the use of a nano service. It more closely resembles
a real-world use-case for nano services.
To see how the service is used through a prearranged scenario, execute the make demo command from the example folder. The scenario provisions and deprovisions multiple netsim devices to show different states and behaviors, characteristic of nano services.
The service, called vrouter, defines three component
types in the src/yang/vrouter.yang file:
-
vr:vrouter: A “day-0” component that creates and initializes a netsim process as a virtual router device. -
vr:vrouter-day1: A “day-1” component for configuring the created device and tracking NETCONF notifications.
As the name implies, the day-0 component must provision before the day-1 component. Since the two provision in sequence, in general, a single component would suffice. But the components are kept separate to illustrate component dependencies.
The behavior tree synthesizes each of the components for a service instance using some service-specific names. In order to do so, the example defines three variables to hold different names:
// vrouter name
ncs:variable "NAME" {
ncs:value-expr "current()/name";
}
// vrouter component name
ncs:variable "D0NAME" {
ncs:value-expr "concat(current()/name, '-day0')";
}
// vrouter day1 component name
ncs:variable "D1NAME" {
ncs:value-expr "concat(current()/name, '-day1')";
}
The vr:vrouter (day-0) component has a number
of plan states that it goes through during provisioning:
-
ncs:init
-
vr:requested
-
vr:onboarded
-
ncs:ready
The init and ready states are required as the first and last state
in all components for correct overall state tracking in
ncs:self. They have no additional logic tied
to them.
The vr:requested state represents the first step in virtual router provisioning. While it does not perform any configuration itself (no nano-callback statement), it calls a post-action that does all the work. The following is a snippet of the plan outline for this state:
ncs:state "vr:requested" {
ncs:create {
// Call a Python action to create and start a netsim vrouter
ncs:post-action-node "$SERVICE" {
ncs:action-name "create-vrouter";
ncs:result-expr "result = 'true'";
ncs:sync;
}
}
}
The create-router action calls the Python code inside
the python/vrouter/main.py file, which runs
a couple of system commands, such as the
ncs-netsim create-device and the
ncs-netsim start commands. These commands do
the same thing as you would if you performed the task manually from
the shell.
The vr:requested state also has a delete post-action, analogous to create, which stops and removes the netsim device during service deprovisioning or backtracking.
Inspecting the Python code for these post actions will reveal that a semaphore is used to control access to the common netsim resource. It is needed because multiple vrouter instances may run the create and delete action callbacks in parallel. The Python semaphore is shared between the delete and create action processes using a Python multiprocessing manager, as the example configure the NSO Python VM to start the actions in multiprocessing mode. See the section called “The application component” for details.
In vr:onboarded, the nano Python callback function from the
main.py file adds the relevant NSO device
entry for a newly-created netsim device. It also configures NSO
to receive notifications from this device through a NETCONF
subscription.
When the NSO configuration is complete, the state transitions
into the reached status, denoting the onboarding has completed
successfully.
The vr:vrouter component handles so-called
day-0 provisioning. Alongside this component, the
vr:vrouter-day1 component starts provisioning
in parallel.
During provisioning, it transitions through the following states:
-
ncs:init
-
vr:configured
-
vr:deployed
-
ncs:ready
The component reaches the init state right away. However, the vr:configured state has a precondition:
ncs:state "vr:configured" {
ncs:create {
// Wait for the onboarding to complete
ncs:pre-condition {
ncs:monitor "$SERVICE/plan/component[type='vr:vrouter']" +
"[name=$D0NAME]/state[name='vr:onboarded']" {
ncs:trigger-expr "post-action-status = 'create-reached'";
}
}
// Invoke a service template to configure the vrouter
ncs:nano-callback;
}
}
Provisioning can continue only after the first component,
vr:vrouter, has executed its vr:onboarded
post-action. The precondition demonstrates how one component can
depend on another component reaching some particular state or
successfully executing a post-action.
The vr:onboarded post-action performs a sync-from
command for the new device.
After that happens, the vr:configured state can push the device
configuration according to the service parameters, by using an XML
template, templates/vrouter-configured.xml.
The service simply configures an interface with a VLAN ID and a
description.
Similarly, the vr:deployed state has its own precondition, which
makes use of the ncs:any statement. It specifies either
(any) of the two monitor statements will satisfy the precondition.
One of them checks the last received NETCONF notification contains
a link-status value of up for the
configured interface.
In other words, it will wait for the interface to become operational.
However, relying solely on notifications in the precondition can be problematic, as the received notifications list in NSO can be cleared and would result in unintentional backtracking on a service re-deploy. For this reason, there is the other monitor statement, checking the device live-status.
Once either of the conditions is satisfied, it marks the end of provisioning. Perhaps the use of notifications in this case feels a little superficial but it illustrates a possible approach to waiting for the steady state, such as routing adjacencies to form and alike.
Altogether, the example shows how to use different nano service mechanisms in a single, complex, multistage service that combines configuration and side-effects. The example also includes a Python script that uses the RESTCONF protocol to configure a service instance and monitor its provisioning status. You are encouraged to configure a service instance yourself and explore the provisioning process in detail, including service removal. Regarding removal, have you noticed how nano services can deprovision in stages, but the service instance is gone from the configuration right away?
By removing the service instance configuration from NSO, you start a service deprovisioning process. For an ordinary service, a stored reverse diff-set is applied, ensuring that all of the service-induced configuration is removed in the same transaction. For nano services, having a staged, multistep service delete operation, this is not possible. The provisioned states must be backtracked one by one, often across multiple transactions. With the service instance deleted, NSO must track the deprovisioning progress elsewhere.
For this reason, NSO mutates a nano service instance when it is removed. The instance is transformed into a zombie service, which represents the original service that still requires deprovisioning. Once the deprovisioning is complete, with all the states backtracked, the zombie is automatically removed.
Zombie service instances are stored with their service data, their
plan states, and diff-sets in a /ncs:zombies/services
list. When a service mutates to a zombie, all plan components are
set to back-tracking mode and all service pre-condition kickers
are rewritten to reference the zombie service instead.
Also, the nano service subsystem now updates the zombie plan states
as deprovisioning progresses. You can use the
show zombies service command to inspect the plan.
Under normal conditions, you should not see any zombies, except for the service instances that are actively deprovisioning. However, if an error occurs, the deprovisioning process will stop with an error status and a zombie will remain. With a zombie present, NSO will not allow creating the same service instance in the configuration tree. The zombie must be removed first.
After addressing the underlying problem, you can restart the
deprovisioning process with the re-deploy or the
reactive-re-deploy actions. The difference between
the two is which user the action uses.
The re-deploy uses the current user that initiated
the action whilst the reactive-re-deploy action keeps
using the same user that last modified the zombie service.
These zombie actions behave a bit differently than their normal service counterparts. In particular, the zombie variants perform the following steps to better serve the deprovisioning process:
-
Start a temporary transaction in which the service is reinstated (created). The service plan will have the same status as it had when it mutated.
-
Back-track plan components in a normal fashion, that is, removing device changes for states with delete pre-conditions satisfied.
-
If all components are completely back-tracked, the zombie is removed from the zombie-list. Otherwise, the service and the current plan states are stored back into the zombie-list, with new kickers waiting to activate the zombie when some delete pre-condition is satisfied.
In addition, zombie services support the resurrect action.
The action reinstates the zombie back in the configuration tree as
a real service, with the current plan status, and reverts plan
components back from back-tracking to normal mode. It is an
“undo” for a nano service delete.
In some situations, especially during nano service development,
a zombie may get stuck because of a misconfigured precondition or
similar issues. A re-deploy is unlikely to help in that case and
you may need to forcefully remove the problematic plan component.
The force-back-track action performs this job and allows
you to backtrack to a specific state, if specified. But beware that
using the action avoids calling any post-actions or delete callbacks
for the forcefully backtracked states, even though the recorded
configuration modifications are reverted.
It can and will leave your systems in an
inconsistent or broken state if you are not careful.
When a service is provisioned in stages, as nano services are, the success of the initial commit no longer indicates the service is provisioned. Provisioning may take a while and may fail later, requiring you to consult the service plan to observe the service status. This makes it harder to tell when a service finishes provisioning, for example. Fortunately, services provide a set of notifications that indicate important events in the service's life-cycle, including a successful completion. These events enable NETCONF and RESTCONF clients to subscribe to events instead of polling the plan and commit queue status.
The built-in service-state-changes NETCONF/RESTCONF stream is used
by NSO to generate northbound notifications for services,
including nano services.
The event stream is enabled by default in ncs.conf,
however, individual notification events must be explicitly configured
to be sent.
When a service's plan component changes state, the
plan-state-change notification is generated with
the new state of the plan. It includes the status, which indicates
one of not-reached, reached, or failed.
The notification is sent when the state is created,
modified, or deleted, depending on the
configuration.
For reference on the structure and all the fields present in
the notification, please see the YANG model in the
tailf-ncs-plan.yang file.
As a common use-case, an event with status
reached for the self component
ready state signifies that all nano service components
have reached their ready state and provisioning is complete.
A simple example of this scenario is included in the
examples.ncs/development-guide/nano-services/netsim-vrouter/demo.py
Python script, using RESTCONF.
To enable the plan-state-change notifications to be sent, you must enable them for a specific service in NSO. For example, can load the following configuration into the CDB as an XML initialization file:
<services xmlns="http://tail-f.com/ns/ncs"> <plan-notifications> <subscription> <name>nano1</name> <service-type>/vr:vrouter</service-type> <component-type>self</component-type> <state>ready</state> <operation>modified</operation> </subscription> <subscription> <name>nano2</name> <service-type>/vr:vrouter</service-type> <component-type>self</component-type> <state>ready</state> <operation>created</operation> </subscription> </plan-notifications> </services>
This configuration enables notifications for the self component's ready state when created or modified.
When a service is committed through the commit queue, this
notification acts as a reference regarding the state of the service.
Notifications are sent when the service commit queue item is waiting
to run, executing, waiting to be unlocked, completed, failed, or
deleted. More details on the service-commit-queue-event
notification content can be found in the YANG model inside
tailf-ncs-services.yang .
For example, the failed event can be used to detect
that a nano service instance deployment failed because a
configuration change committed through the commit queue has failed.
Measures to resolve the issue can then be taken and the nano service
instance can be re-deployed.
A simple example of this scenario is included in the
examples.ncs/development-guide/nano-services/netsim-vrouter/demo.py
Python script where the service is committed through the commit
queue, using RESTCONF. By design, the configuration commit to a
device fails, resulting in a commit-queue-notification
with the failed event status for the commit queue
item.
To enable the service-commit-queue-event notifications to be sent, you can load the following example configuration into NSO, as an XML initialization file or some other way:
<services xmlns="http://tail-f.com/ns/ncs"> <commit-queue-notifications> <subscription> <name>nano1</name> <service-type>/vr:vrouter</service-type> </subscription> </commit-queue-notifications> </services>
The following examples demonstrate the usage and sample events for the notification functionality, described in this section, using RESTCONF, NETCONF, and CLI northbound interfaces.
RESTCONF subscription request using curl:
$ curl -isu admin:admin -X GET -H "Accept: text/event-stream"
http://localhost:8080/restconf/streams/service-state-changes/json
data: {
data: "ietf-restconf:notification": {
data: "eventTime": "2021-11-16T20:36:06.324322+00:00",
data: "tailf-ncs:service-commit-queue-event": {
data: "service": "/vrouter:vrouter[name='vr7']",
data: "id": 1637135519125,
data: "status": "completed",
data: "trace-id": "vr7-1"
data: }
data: }
data: }
data: {
data: "ietf-restconf:notification": {
data: "eventTime": "2021-11-16T20:36:06.728911+00:00",
data: "tailf-ncs:plan-state-change": {
data: "service": "/vrouter:vrouter[name='vr7']",
data: "component": "self",
data: "state": "tailf-ncs:ready",
data: "operation": "modified",
data: "status": "reached",
data: "trace-id": "vr7-1"
data: }
data: }
data: }See the section called “Streams” in Northbound APIs for further reference.
NETCONF create subscription using netconf-console:
$ netconf-console create-subscription=service-state-changes
<?xml version="1.0" encoding="UTF-8"?>
<notification xmlns="urn:ietf:params:xml:ns:netconf:notification:1.0">
<eventTime>2021-11-16T20:36:06.324322+00:00</eventTime>
<service-commit-queue-event xmlns="http://tail-f.com/ns/ncs">
<service xmlns:vr="http://com/example/vrouter">/vr:vrouter[vr:name='vr7']</service>
<id>1637135519125</id>
<status>completed</status>
<trace-id>vr7-1</trace-id>
</service-commit-queue-event>
</notification>
<?xml version="1.0" encoding="UTF-8"?>
<notification xmlns="urn:ietf:params:xml:ns:netconf:notification:1.0">
<eventTime>2021-11-16T20:36:06.728911+00:00</eventTime>
<plan-state-change xmlns="http://tail-f.com/ns/ncs">
<service xmlns:vr="http://com/example/vrouter">/vr:vrouter[vr:name='vr7']</service>
<component>self</component>
<state>ready</state>
<operation>modified</operation>
<status>reached</status>
<trace-id>vr7-1</trace-id>
</plan-state-change>
</notification>See the section called “Notification Capability” in Northbound APIs for further reference.
CLI show received notifications using ncs_cli:
$ ncs_cli -u admin -C <<<'show notification stream service-state-changes'
notification
eventTime 2021-11-16T20:36:06.324322+00:00
service-commit-queue-event
service /vrouter[name='vr17']
id 1637135519125
status completed
trace-id vr7-1
!
!
notification
eventTime 2021-11-16T20:36:06.728911+00:00
plan-state-change
service /vrouter[name='vr7']
component self
state ready
operation modified
status reached
trace-id vr7-1
!
!
You have likely noticed the trace-id field at the end of the example
notifications above. The trace id is an optional but very useful
parameter when committing the service configuration.
It helps you trace the commit in the emitted log messages and
the service-state-changes stream notifications.
The above notifications, taken from the
examples.ncs/development-guide/nano-services/netsim-vrouter
example, are emitted after applying a RESTCONF plain patch:
$ curl -isu admin:admin -X PATCH
-H "Content-type: application/yang-data+json"
'http://localhost:8080/restconf/data?commit-queue=sync&trace-id=vr7-1'
-d '{ "vrouter:vrouter": [ { "name": "vr7" } ] }'
Note that the trace id is specified as part of the URL. If missing, NSO will generate and assign one on its own.
At times, especially when you use an iterative development approach or simply due to changing requirements, you might need to update (change) an existing nano service and its implementation. In addition to other service update best practices, such as model upgrades, you must carefully consider the nano-service-specific aspects. The following discussion mostly focuses on migrating an already provisioned service instance to a newer version; however, the same concepts also apply while you are initially developing the service.
In the simple case, updating the model of a nano service and getting the changes to show up in an already created instance is a matter of executing a normal re-deploy. This will synthesize any new components and provision them, along with the new configuration, just like you would expect from a non-nano service.
A major difference occurs if a service instance is deleted and is in a zombie state when the nano service is updated. You should be aware that no synthetization is done for that service instance. The only goal of a deleted service is to revert any changes made by the service instance. Therefore, in that case, the synthetization is not needed. It means that, if you've made changes to callbacks, post actions, or pre-conditions, those changes will not be applied to zombies of the nano service. If a service instance requires the new changes to be applied, you must re-deploy it before it is deleted.
When updating nano services, you also need to be aware that any old callbacks, post actions and any other models that the service depends on, need to be available in the new nano service package until all service instances created before the update have either been updated (through a re-deploy) or fully deleted. Therefore, you must take great care with any updates to a service if there are still zombies left in the system.
Adding new components to the behavior tree will create the new components during the next re-deploy (synthetization) and execute the states in the new components as is normally done.
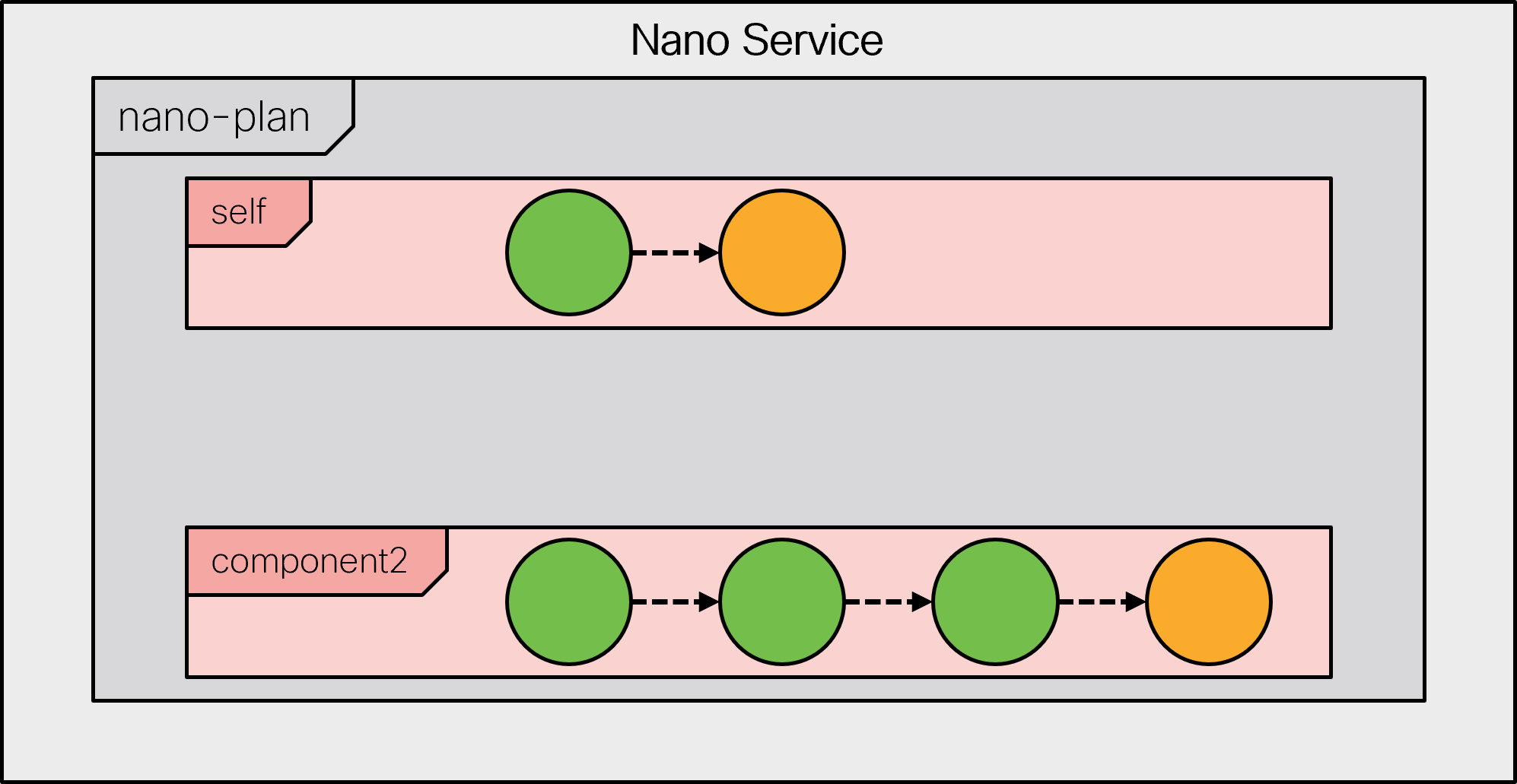
When removing components from the behavior tree, the components that are removed are set to backtracking and are backtracked fully before they are removed from the plan.
When you remove a component, do so carefully so that any callbacks, post actions or any other model data that the component depends on are not removed until all instances of the old component are removed.
If the identity for a component type is removed, then NSO removes the component from the database when upgrading the package. If this happens, the component is not backtracked and the reverse diffsets are not applied.
Replacing components in the behavior tree is the same as having unrelated components that are deleted and added in the same update. The deleted components are backtracked as far as possible, and then the added components are created and their states executed in order.
In some cases, this is not the desired behaviour when replacing a
component. For example, if you only want to rename a component,
backtracking and then adding the component again might make
NSO push unnecessary changes to the network or run delete
callbacks and post actions that should not be run. To remedy
this, you might add the ncs:deprecates-component
statements to the new component, detailing which components it
replaces. NSO then skips the backtracking of the old
component and just applies all reverse diffsets of the deprecated
component. In the same re-deploy, it then executes the new
component as usual. Therefore, if the new component produces the same
configuration as the old component, nothing is pushed to the network.
If any of the deprecated components are backtracking, the backtracking will be handled before the component is removed. When there are multiple components that are deprecated in the same update, the components will not be removed, as detailed above, until all of them are done backtracking (if any one of them are backtracking).
When adding or removing states in a component, the component is backtracked before a new component with the new states is added and executed. If the updated component produces the same configuration as the old one (and no preconditions halt the execution), this should lead to no configuration being pushed to the network. So, if changes to the states are done, you need to take care when writing the preconditions and post actions for a component if no new changes should be pushed to the network.
Any changes to the already present states that are kept in the updated component will not have their configuration updated until the new component is created, which happens after the old one has been fully backtracked.
For a component where only the configuration for one or more states have changed, the synthetization process will update the component with the new configuration and make sure that any new callbacks or similar are called during future execution of the component.
The text in this section sums up as well as adds additional detail on the way nano services operate, which you will hopefully find beneficial during implementation.
To reiterate, the purpose of a nano service is to break down an
RFM service into its isolated steps. It extends the normal
ncs:servicepoint YANG mechanism and requires the following:
-
A YANG definition of the service input parameters, with a service point name and the additional nano-plan-data grouping.
-
A YANG definition of the plan component types and their states in a plan outline.
-
A YANG definition of a behavior tree for the service. The behavior tree defines how and when to instantiate components in the plan.
-
Code or templates for individual state transfers in the plan.
When a nano service is committed, the system evaluates its behavior tree. The result of this evaluation is a set of components that form the current plan for the service. This set of components is compared with the previous plan (before the commit). If there are new components, they are processed one by one.
For each component in the plan, it is executed state by state in
the defined order. Before entering a new state, the create
pre-condition for the state is evaluated if it
exists. If a create pre-condition exists and if it is not
satisfied, the system stops progressing this component and
jumps to the next one. A kicker is then defined for
the pre-condition that was not satisfied. Later, when this kicker
triggers and the pre-condition is satisfied, it performs a
reactive-re-deploy and the kicker is removed.
This kicker mechanism becomes a self-sustained RFM loop.
If a state's pre-conditions are met, the callback function or template associated with the state is invoked, if it exists. If the callback is successful, the state is marked as reached, and the next state is executed.
A component, that is no longer present but was in the previous plan, goes into back-tracking mode, during which the goal is to remove all reached states and eventually remove the component from the plan. Removing state data changes is performed in a strict reverse order, beginning with the last reached state and taking into account a delete pre-condition if defined.
A nano service is expected to have a component. All components are
expected to have ncs:init as its first state and
ncs:ready as its last state.
A component type can have any number of specific states in between
ncs:init and ncs:ready.
Back-tracking is completely automatic and occurs in the following scenarios:
- State pre-condition not satisfied
-
A reached state's pre-condition is no longer satisfied, and there are subsequent states that are reached and contain reverse diff-sets.
- Plan component is removed
-
When a plan component is removed and has reached states that contain reverse diff-sets.
- Service is deleted
-
When a service is deleted, NSO will set all plan components to back-tracking mode before deleting the service.
For each RFM loop, NSO traverses each component and state in order. For each non-satisfied create pre-condition, a kicker is started that monitors and triggers when the pre-condition becomes satisfied.
 |
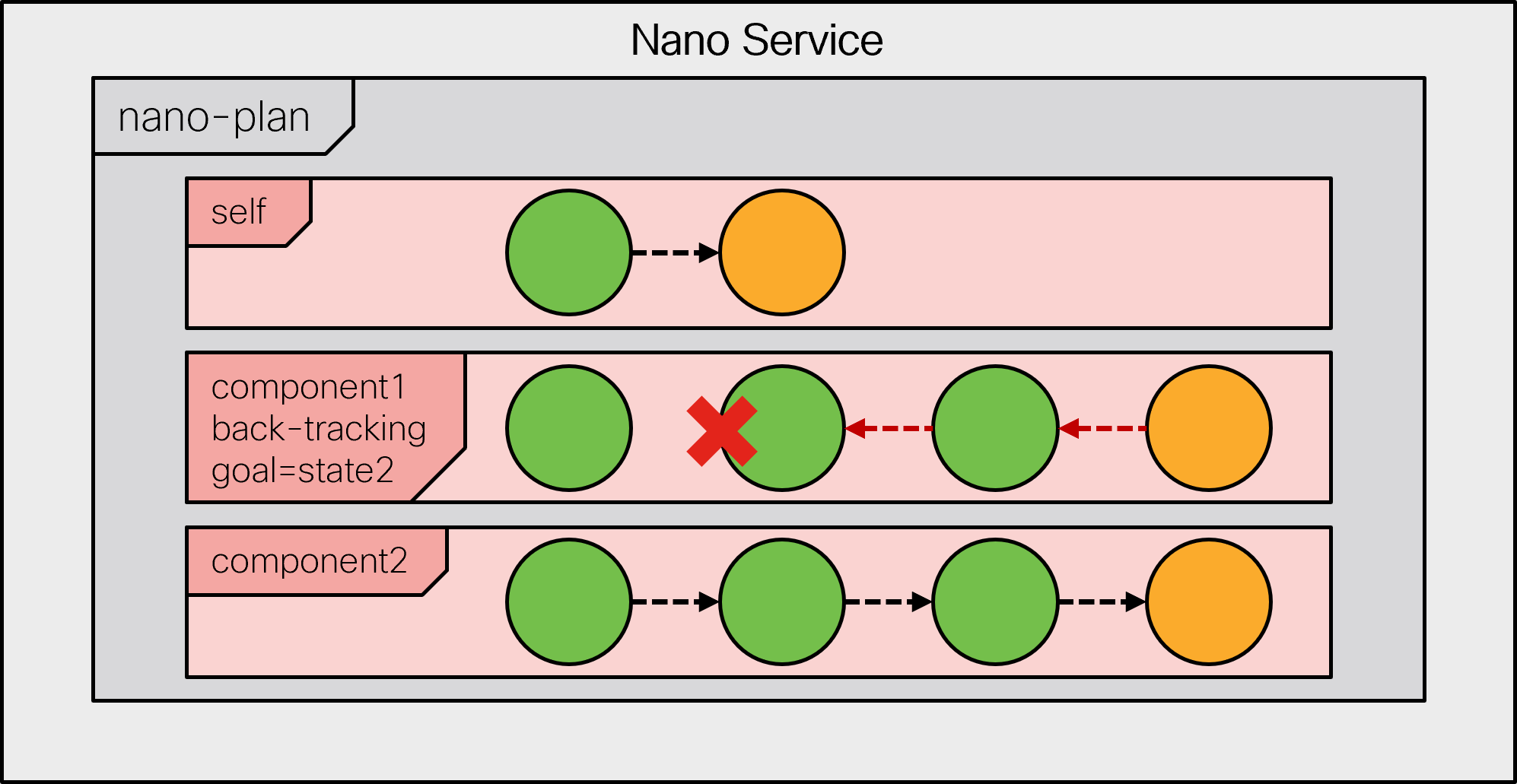
While traversing the states, a create pre-condition that was
previously satisfied may become un-satisfied. If there are
subsequent reached states that contain reverse diff-sets,
then the component must be set to back-tracking mode. The
back-tracking mode has as its goal to revert all changes up
to the state which originally failed to satisfy its create
pre-condition. While back-tracking, the delete pre-condition
for each state is evaluated, if it exists. If the delete
pre-condition is satisfied, the state's reverse diff-set is
applied, and the next state is considered. If the delete
pre-condition is not satisfied, a kicker is created to
monitor this delete pre-condition. When the kicker triggers,
a reactive-re-deploy is called and the
back-tracking will continue until the goal is reached.
 |
When the back-tracking plan component has reached its goal state, the component is set to normal mode again. The state's create pre-condition is evaluated and if it is satisfied the state is entered or otherwise a kicker is created as described above.
 |
In some circumstances a complete plan component is removed (for example, if the service input parameters are changed). If this happens, the plan component is checked if it contains reached states that contain reverse diff-sets.
 |
If the removed component contains reached states with reverse diff-sets, the deletion of the component is deferred and the component is set to back-tracking mode.
 |
In this case, there is no specified goal state for the back-tracking. This means that when all the states have been reverted, the component is automatically deleted.
 |
If a service is deleted, all components are set to back-tracking mode. The service becomes a zombie, storing away its plan states so that the service configuration can be removed.
All components of a deleted service are set in backtracking mode.
 |
When a component becomes completely back-tracked, it is removed.
 |
When all components in the plan are deleted, the service is removed.
 |
A nano service behavior tree is a data structure defined for each service type. Without a behavior tree defined for the service point, the nano service cannot execute. It is the behavior tree that defines the currently executing nano-plan with its components.
Note
This is in stark contrast to plan-data used for logging purposes
where the programmer needs to write the plan and its components
in the create() callback.
For nano services, it is not allowed to define the nano plan in
any other way than by a behavior tree.
The purpose of a behavior tree is to have a declarative way to specify how the service's input parameters are mapped to a set of component instances.
A behavior tree is a directed tree in which the nodes are classified as control flow nodes and execution nodes. For each pair of connected nodes, the outgoing node is called parent and the incoming node is called child. A control flow node has zero or one parent and at least one child, and the execution nodes have one parent and no children.
There is exactly one special control flow node called the root, which is the only control flow node without a parent.
This definition implies that all interior nodes are control flow nodes, and all leaves are execution nodes. When creating, modifying, or deleting a nano service, NSO evaluates the behavior tree to render the current nano plan for the service. This process is called synthesizing the plan.
The control flow nodes have a different behavior, but in the end, they all synthesize its children in zero or more instances. When the a control flow node is synthesized, the system executes its rules for synthesizing the node's children. Synthesizing an execution node adds the corresponding plan component instance to the nano service's plan.
All control flow and execution nodes may define pre-conditions, which must be satisfied to synthesize the node. If a pre-condition is not satisfied, a kicker is started to monitor the pre-condition.
All control flow and execution nodes may define an observe monitor which results in a kicker being started for the monitor when the node is synthesized.
If an invocation of an RFM loop (for example, a re-deploy) synthesizes the behavior tree and a pre-condition for a child is no longer satisfied, the sub-tree with its plan-components is removed (that is, the plan-components are set to back-tracking mode).
The following control flow nodes are defined:
- Selector
-
A selector node has a set of children which are synthesized as described above.
- Multiplier
-
A multiplier has a foreach mechanism that produces a list of elements. For each resulting element, the children are synthesized as described above. This can be used, for example, to create several plan-components of the same type.
There is just one type of execution node:
- Create component
-
The create-component execution node creates an instance of the component type that it refers to in the plan.
It is recommended to keep the behavior tree as flat as possible. The most trivial case is when the behavior tree creates a static nano-plan, that is, all the plan-components are defined and never removed. The following is an example of such a behavior tree:
 |
Having a selector on root implies that all plan-components are created if they don't have any pre-conditions, or for which the pre-conditions are satisfied.
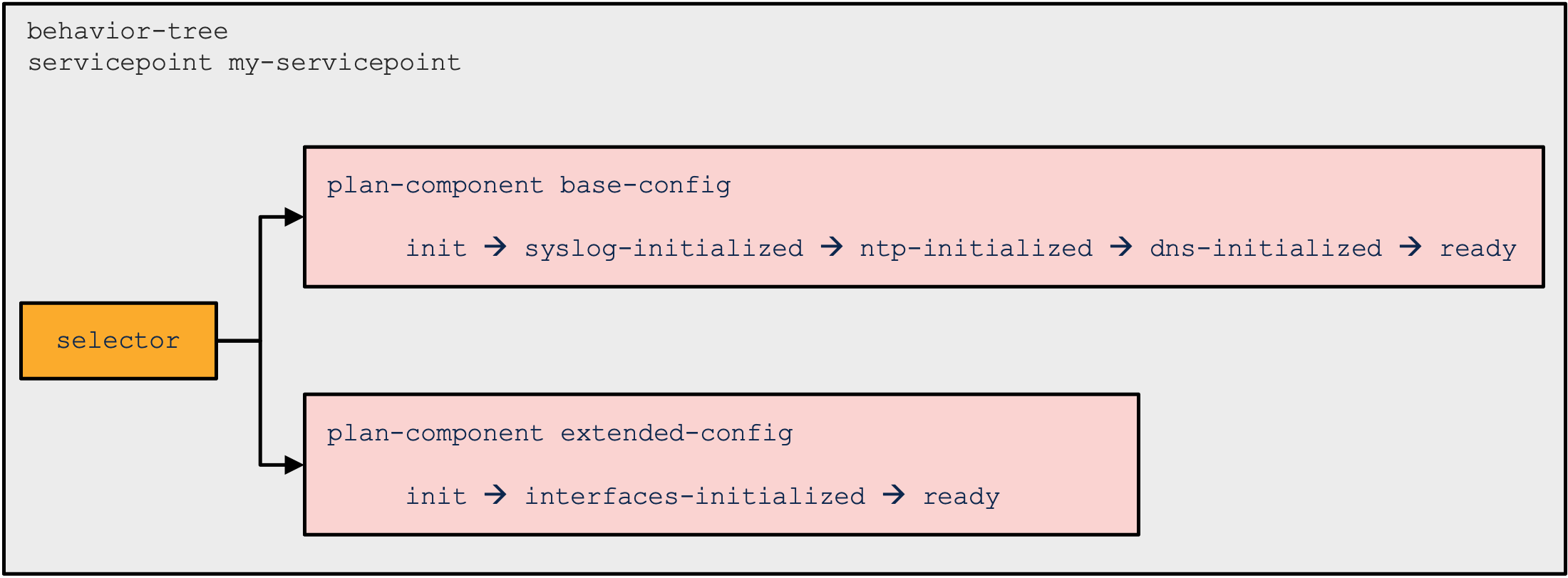
An example of a more elaborated behavior tree is the following:
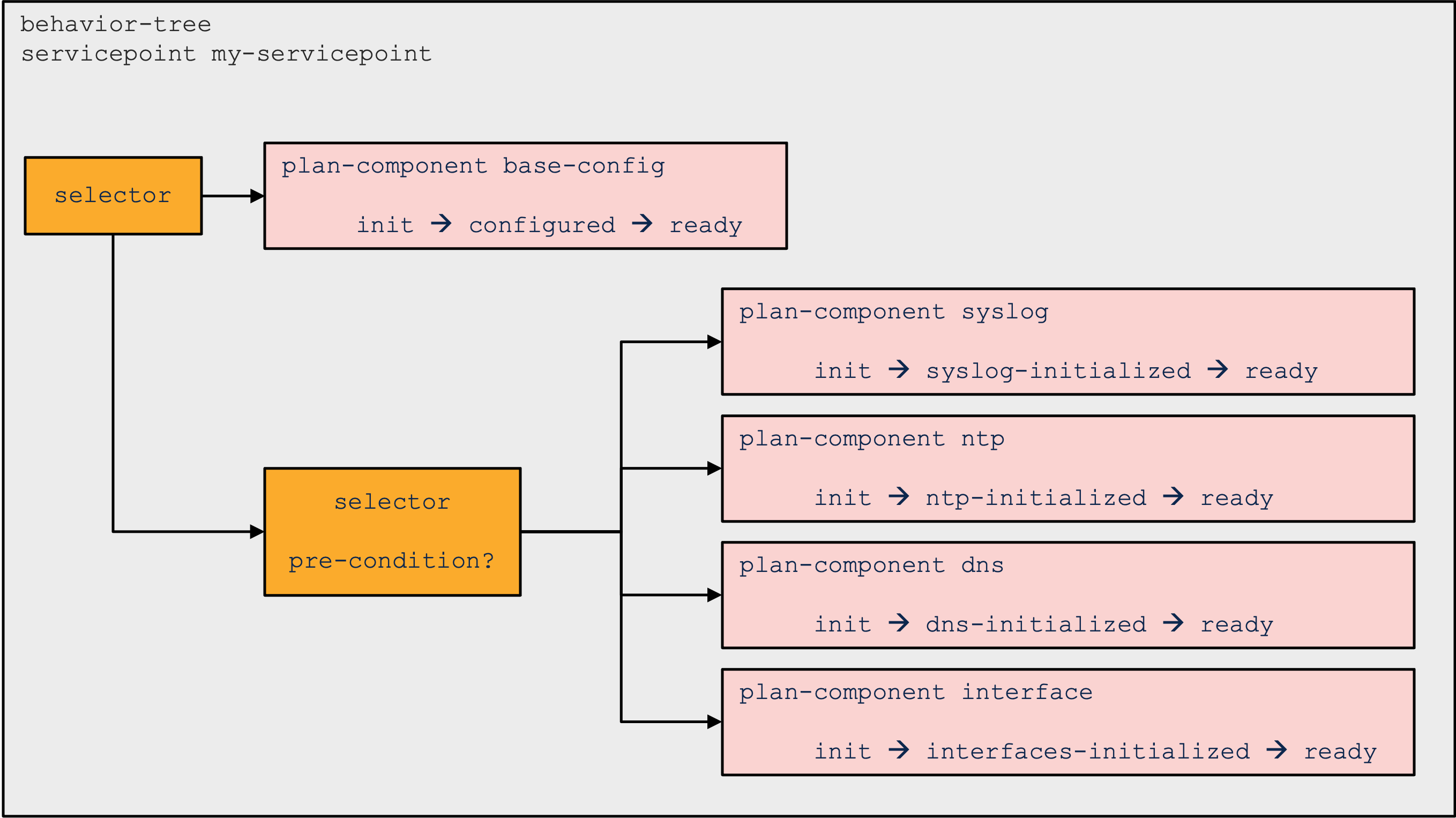 |
This behavior tree has a selector node as the root. It will always synthesize the "base-config" plan component and then evaluate then pre-condition for the selector child. If that pre-condition is satisfied, it then creates four other plan-components.
The multiplier control flow node is used when a plan component
of a certain type should be cloned into several copies depending
on some service input parameters. For this reason, the multiplier
node defines a foreach, a when, and a
variable. The foreach is
evaluated and for each node in the nodeset that satisfies the
when, the variable is
evaluated as the outcome. The value is used for parameter
substitution to a unique name for a duplicated plan component.
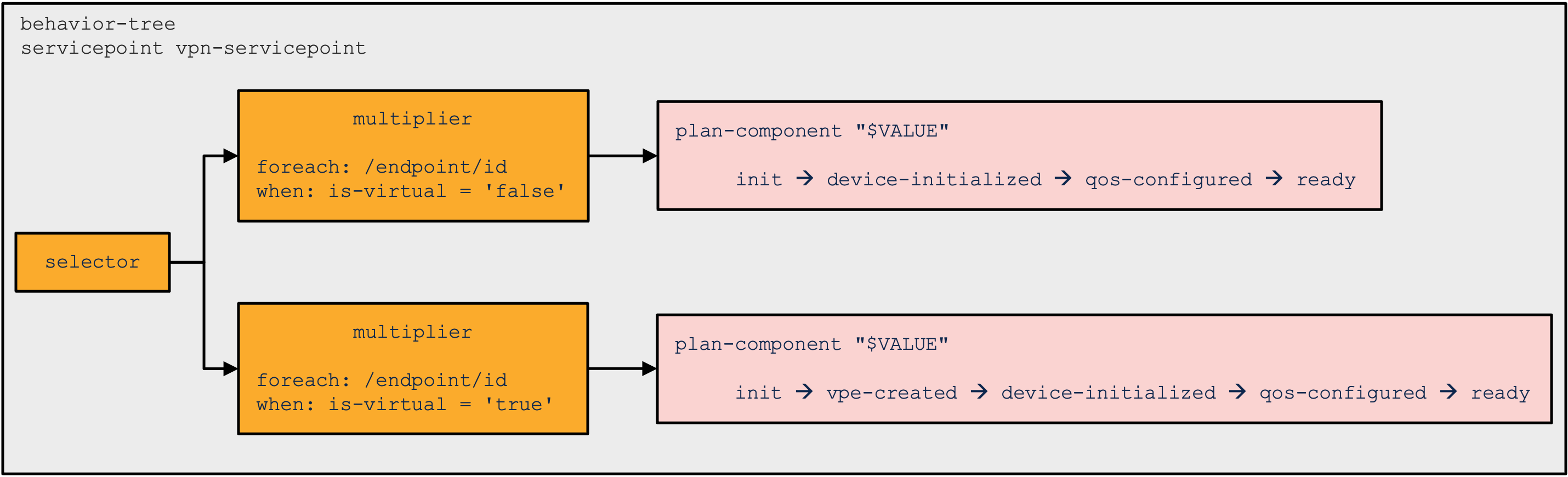 |
The value is also added to the nano service opaque which enables
the individual state nano service create() callbacks
to retrieve the value.
Variables might also have “when” expressions, which are used to decide if the variable should be added to the list of variables or not.
Pre-conditions are what drives the execution of a nano service. A pre-condition is a prerequisite for a state to be executed or a component to be synthesized. If the pre-condition is not satisfied, it is then turned into a kicker which in turn re-deploys the nano service once the condition is fulfilled.
When working with pre-conditions, you need to be aware that they work a bit differently when used as a kicker to re-deploy the service and when they are used in the execution of the service. When the pre-condition is used in the re-deploy kicker, it then works as explained in the kicker documentation (that is, the trigger expression is evaluated before and after the change-set of the commit when the monitored nodeset is changed). When used during the execution of a nano service, you can only evaluate it on the current state of the database, which means that it only checks that the monitor returns a nodeset of one or more nodes and that trigger expression (if there is one) is fulfilled for any of the nodes in the nodeset.
Support for pre-conditions checking, if a node has been deleted, is
handled a bit differently due to the difference in how the pre-condition
is evaluated. Kickers always trigger for changed nodes (add,
deleted, or modified) and can check that the node was deleted in the
commit that triggered the kicker. While in the nano service evaluation,
you only have the current state of the database and the monitor
expression will not return any nodes for evaluation of the trigger
expression, consequently evaluating the pre-condition to false. To support
deletes in both cases, you can create a pre-condition with a monitor
expression and a child node ncs:trigger-on-delete which
then both create a kicker that checks for deletion of the monitored node
and also does the right thing in the nano service evaluation of the
pre-condition. For example, you could have the following component:
ncs:component "base-config" {
ncs:state "init" {
ncs:delete {
ncs:pre-condition {
ncs:monitor "/devices/device[name='test']" {
ncs:trigger-on-delete;
}
}
}
}
ncs:state "ready";
}The component would only trigger the init states delete pre-condition when the device named test is deleted.
It is possible to add multiple monitors to a pre-condition by using
the ncs:all or ncs:any extensions.
Both extensions take one or multiple monitors as argument.
A pre-condition using the ncs:all extension is satisfied
if all monitors given as arguments evaluate to true. A pre-condition
using the ncs:any extension is satisfied if at least
one of the monitors given as argument evaluates to true.
The following component uses the ncs:all and
ncs:any extensions for its self
state's create and delete pre-condition, respectively:
ncs:component "base-config" {
ncs:state "init" {
ncs:create {
ncs:pre-condition {
ncs:all {
ncs:monitor $SERVICE/syslog {
ncs:trigger-expr: "current() = true"
}
ncs:monitor $SERVICE/dns {
ncs:trigger-expr: "current() = true"
}
}
}
}
}
ncs:delete {
ncs:pre-condition {
ncs:any {
ncs:monitor $SERVICE/syslog {
ncs:trigger-expr: "current() = false"
}
ncs:monitor $SERVICE/dns {
ncs:trigger-expr: "current() = false"
}
}
}
}
}
}
ncs:state "ready";
}
The service opaque is a name-value list that can optionally be
created/modified in some of the service callbacks, and then
travels the chain of callbacks
(pre-modification, create, post-modification). It is returned by
the callbacks and stored persistently in the service private
data. Hence, the next service invocation has access to the
current opaque and can make subsequent read/write operations to
the same object.
The object is usually called opaque in Java
and proplist in Python callbacks.
The nano services handle the opaque in a similar fashion, where a callback for every state has access to and can modify the opaque. However, the behavior tree can also define variables, which you can use in preconditions or to set component names. These variables are also available in the callbacks, as component properties. The mechanism is similar but separate from the opaque. While the opaque is a single service-instance-wide object set only from the service code, component variables are set in and scoped according to the behavior tree. That is, component properties contain only the behavior tree variables which are in scope when a component is synthesized.
For example, take the following behavior tree snippet:
ncs:selector {
ncs:variable "VAR1" {
ncs:value-expr "'value1'";
}
ncs:create-component "'base-config'" {
ncs:component-type-ref "t:base-config";
}
ncs:selector {
ncs:variable "VAR2" {
ncs:value-expr "'value2'";
}
ncs:create-component "'component1'" {
ncs:component-type-ref "t:my-component";
}
}
}
The callbacks for states in the “base-config” component
only see the VAR1 variable, while those in
“component1” see both VAR1 and
VAR2 as component properties.
Additionally, both the service opaque and component variables (properties) are used to look up substitutions in nano service XML templates and in the behavior tree. If used in the behavior tree, the same rules apply for the opaque as for component variables. So, a value needs to contain single quotes if you wish to use it verbatim in preconditions and similar constructs, for example:
proplist.append(('VARX', "'some value'"))Using this scheme at an early state, such as the “base-config” component's “ncs:init”, you can have a callback that sets name-value pairs for all other states that are then implemented solely with templates and preconditions.
The nano service can have several callback registrations, one
for each plan component state. But note that some states may have
no callbacks at all. The state may simply act as a
checkpoint, that some condition is satisfied, using
pre-condition statements. A component's
ncs:ready state is a good example of this.
The drawback with this flexible callback registration is that there must be a way for the NSO Service Manager to know if all expected nano service callbacks have been registered. For this reason, all nano service plan component states that require callbacks are marked with this information. When the plan is executed and the callback markings in the plan mismatch with the actual registrations, this results in an error.
All callback registrations in NSO require a daemon to be instantiated, such as a Python or Java process. For nano services, it is allowed to have many daemons where each daemon is responsible for a subset of the plan state callback registrations. The neat thing here is that it becomes possible to mix different callback types (Template/Python/Java) for different plan states.
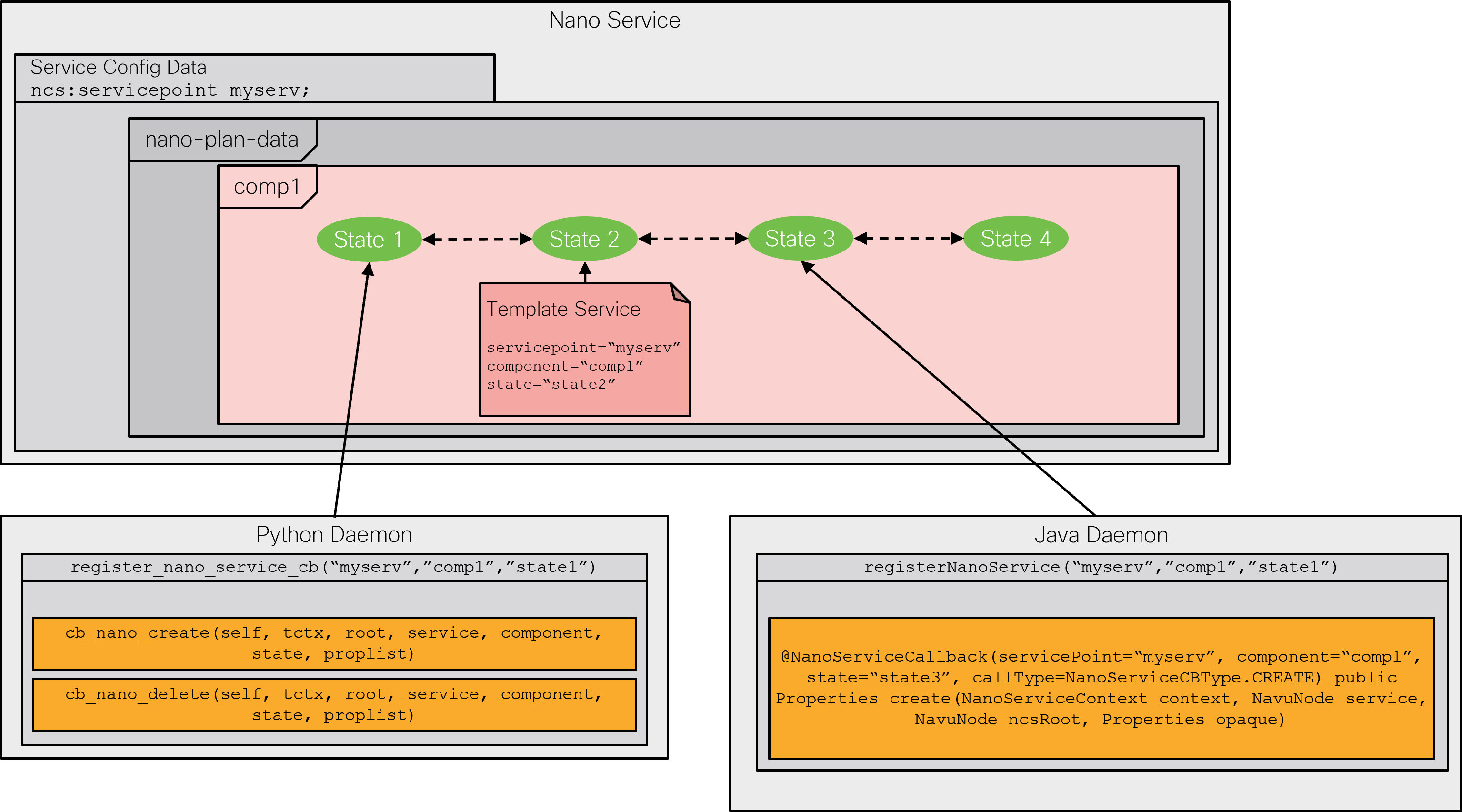 |
The mixed callback feature caters to the case where most of the callbacks are templates and only some are Java or Python. This works well because nano services try to resolve the template parameters using the nano service opaque when applying a template. This is a unique functionality for nano services that makes Java or Python apply-template callbacks unnecessary.
You can implement nano service callbacks as Templates as well as Python, Java, Erlang, and C code. The following examples cover the implementation of Template, Python and Java.
A plan state template, if defined, replaces the need of a
create() callback. In this case, there are no
delete() callbacks and the status definitions must
in this case be handled by the states delete pre-condition.
The template must in addition to the
servicepoint
attribute have a component type and a
state attribute to be registered on the
plan state:
<config-template xmlns="http://tail-f.com/ns/config/1.0" servicepoint="my-servicepoint" componenttype="my:some-component" state="my:some-state"> <devices xmlns="http://tail-f.com/ns/ncs"> <!-- ... --> </devices> </config-template>
Specific to nano services, you can use parameters, such as
$SOMEPARAM in the template. The system searches for
the parameter value in the service opaque and in the component
properties. If it is not defined, applying the template will fail.
A Python create() callback is very similar to its
ordinary service counterpart. The difference is that it has
additional arguments. plan refers to the
synthesized plan, while component and
state specify the component and state
for which it is invoked. The proplist
argument is the nano service opaque (same naming as for ordinary
services) and component_proplist contains
component variables, along with their values.
class NanoServiceCallbacks(ncs.application.NanoService):
@ncs.application.NanoService.create
def cb_nano_create(self, tctx, root, service, plan, component, state,
proplist, component_proplist):
...
@ncs.application.NanoService.delete
def cb_nano_delete(self, tctx, root, service, plan, component, state,
proplist, component_proplist):
...In the majority of cases, you should not need to manage the status of nano states yourself. However, should you need to override the default behavior, you can set the status explicitly, in the callback, using code similar to the following :
plan.component[component].state[state].status = 'failed'
The Python nano service callback needs a registration call for the specific servicepoint, componentType, and state that it should be invoked for.
class Main(ncs.application.Application):
def setup(self):
...
self.register_nano_service('my-servicepoint',
'my:some-component',
'my:some-state',
NanoServiceCallbacks)For Java, annotations are used to define the callbacks for the component states. The registration of these callbacks is performed by the ncs-java-vm. The NanoServiceContext argument contains methods for retrieving the component and state for the invoked callback as well as methods for setting the resulting plan state status.
public class myRFS {
@NanoServiceCallback(servicePoint="my-servicepoint",
componentType="my:some-component",
state="my:some-state",
callType=NanoServiceCBType.CREATE)
public Properties createSomeComponentSomeState(
NanoServiceContext context,
NavuNode service,
NavuNode ncsRoot,
Properties opaque,
Properties componentProperties)
throws DpCallbackException {
// ...
}
@NanoServiceCallback(servicePoint="my-servicepoint",
componentType="my:some-component",
state="my:some-state",
callType=NanoServiceCBType.DELETE)
public Properties deleteSomeComponentSomeState(
NanoServiceContext context,
NavuNode service,
NavuNode ncsRoot,
Properties opaque,
Properties componentProperties)
throws DpCallbackException {
// ...
}
Several componentType and state callbacks can be defined in
the same Java class and are then registered by the same
daemon.
In some scenarios, there is a need to be able to register a callback for a certain state in several components with different component types. For this reason, it is possible to register a callback with a wildcard, using “*” as the component type. The invoked state sends the actual component name to the callback, allowing the callback to still distinguish component types if required.
In Python, the component type is provided as an argument to the
callback (component) and a generic callback
is registered with an asterisk for a component, such as:
self.register_nano_service('my-servicepoint', '*', state, ServiceCallbacks)
In Java, you can perform the registration in the method annotation,
as before. To retrieve the calling component type, use the
NanoServiceContext.getComponent() method.
For example:
@NanoServiceCallback(servicePoint="my-servicepoint",
componentType="*", state="my:some-state",
callType=NanoServiceCBType.CREATE)
public Properties genericNanoCreate(NanoServiceContext context,
NavuNode service,
NavuNode ncsRoot,
Properties opaque,
Properties componentProperties)
throws DpCallbackException {
String currentComponent = context.getComponent();
// ...
}The generic callback can then act for the registered state in any component type.
The ordinary service pre/post modification callbacks still exist for nano services. They are registered as for an ordinary service and are invoked before the behavior tree synthetization, and after the last component/state invocation.
Registration of the ordinary create() will not
fail for a nano service. But they will never be invoked.
When implementing a nano service, you might end up in a situation where a commit is needed between states in a component to make sure that something has happened before the service can continue executing. One example of such behaviour is if the service is dependent on the notifications from a device. In such a case, you can setup a notification kicker in the first state and then trigger a forced commit before any later states can proceed, therefore making sure that all future notifications are seen by the later states of the component.
To force a commit in between two states of a component, add the
ncs:force-commit tag in a ncs:create or
ncs:delete tag. See the following example:
ncs:component "base-config" {
ncs:state "init" {
ncs:create {
ncs:force-commit;
}
}
ncs:state "ready" {
ncs:delete {
ncs:force-commit;
}
}
}
When defining a nano service, it is assumed that the plan
is stored under the service path, as ncs:plan-data is
added to the service definition. When the service instance is
deleted, the plan is moved to the zombie instead, since the
instance has been removed and the plan cannot be stored under it
anymore. When writing other services or when working with a nano
service in general, you need to be aware that the plan for a
service might be in one of these two places depending on if the
service instance has been deleted or not.
To make it easier to work with a service, you can define a custom
location for the plan and its history. In the
ncs:service-behaviour-tree, you can specify that the
plan should be stored outside of the service by setting the
ncs:plan-location tag to a custom location. The
location where the plan should be stored must be either a list or
a container and include the ncs:plan-data tag.
The plan data is then created in this location, no matter if
the service instance has been deleted (turned into a zombie)
or not, making it easy to base decisions on the state of the
service as all plan queries can query the same plan.
You can use XPath with the ncs:plan-location statement.
The XPath is evaluated based on the nano service context. When the
list or container, which contains the plan, is nested under another
list, the outer list instance must exist before creating the nano
service.
At the same time, the outer list instance of the plan location must
also remain intact for further service's life-cycle management,
such as redeployment, deletion etc.
Otherwise, an error will be returned, logged, and any service
interaction (create, re-deploy, delete, etc.) won't succeed.
identity base-config {
base ncs:plan-component-type;
}
list custom {
description "Custom plan location example service.";
key name;
leaf name {
tailf:info "Unique service id";
tailf:cli-allow-range;
type string;
}
uses ncs:service-data;
ncs:servicepoint custom-plan-servicepoint;
}
list custom-plan {
description "Custom plan location example plan.";
key name;
leaf name {
tailf:info "Unique service id";
tailf:cli-allow-range;
type string;
}
uses ncs:nano-plan-data;
}
ncs:plan-outline custom-plan {
description
"Custom plan location example outline";
ncs:component-type "p:base-config" {
ncs:state "ncs:init";
ncs:state "ncs:ready";
}
}
ncs:service-behavior-tree custom-plan-location-servicepoint {
description
"Custom plan location example service behaviour three.";
ncs:plan-outline-ref custom:custom-plan;
ncs:plan-location "/custom-plan";
ncs:selector {
ncs:create-component "'base-config'" {
ncs:component-type-ref "p:base-config";
}
}
}The commit queue feature, described in the section called “Commit Queue” in User Guide, allows for increased overall throughput of NSO by committing configuration changes into an outbound queue item instead of directly to affected devices. Nano services are aware of the commit queue and will make use of it, however, this interaction requires additional consideration.
When the commit queue is enabled and there are outstanding commit queue items, the network is lagging behind the CDB. The CDB is forward looking and shows the desired state of the network. Hence, the nano plan shows the desired state as well, since changes to reach this state may not have been pushed to the devices yet.
To keep the convergence of the nano service in sync with the commit queue, nano services behave more asynchronously:
-
A nano service does not make any progression while the service has an outstanding commit queue item. The outstanding item is listed under
plan/commit-queuefor the service, in normal or in zombie mode. -
On completion of the commit queue item, the nano plan comes in sync with the network. The outstanding commit queue item is removed from the list above and the system issues a reactive-re-deploy action to resume the progression of the nano service.
-
Post-actions are delayed, while there is an outstanding commit queue item.
-
Deleting a nano service always (even without a commit queue) creates a zombie and schedules its re-deploy to perform backtracking. Again, the re-deploy and, consequently, removal will not take place while there is an outstanding commit queue item.
The reason for such behavior is that commit queue items can fail. In case of a failure, the CDB and the network have diverged. In turn, the nano plan may have diverged and not reflect the actual network state if the failed commit queue item contained changes related to the nano service.
What is worse, the network may be left in an inconsistent state.
To counter that, NSO supports multiple recovery options for
the commit queue.
Since NSO release 5.7, using the rollback-on-error
is the recommended option, as it undoes all the changes that are
part of the same transaction. If the transaction includes the
initial service instance creation, the instance is removed as
well. That is usually not desired for nano services.
A nano service will avoid such removal by only committing the
service intent (the instance configuration) in the initial
transaction. In this case, the service avoids potential rollback,
as it does not perform any device configuration in the same
transaction but progresses solely through (reactive) re-deploy.
While error recovery helps keeping the network consistent, the end result remains that the requested change was not deployed. If a commit queue item with nano service related changes fails, that signifies a failure for the nano service and NSO does the following:
-
Service progression stops.
-
The nano plan is marked as failed by creating the
failedleaf under the plan. -
The scheduled post actions are canceled. Canceled post actions stay in the
side-effect-queuewith statuscanceledand are not going to be executed.
After such an event, manual intervention is required. If not using
the rollback-on-error option or rollback transaction
fails, please consult the section called “Commit Queue” in User Guide for the
correct procedure to follow.
Once the cause of the commit queue failure is resolved, you can
manually resume the service progression by invoking the
reactive-re-deploy action on a nano service
or a zombie.
You can find another nano service example under
examples.ncs/getting-started/developing-with-ncs/20-nano-services.
The example illustrates a situation with a simple VPN
link that should be set up between two devices. The link is
considered established only after it is tested and a
test-passed leaf is set to true.
If the VPN link changes, the new endpoints must be set up
before removing the old endpoints, to avoid disturbing customer
traffic during the operation.
The package named link contains the nano service definition. The service has a list containing at most one element, which constitutes the VPN link and is keyed on a-device a-interface b-device b-interface. The list element corresponds to a component-type "link:vlan-link" in the nano service plan.
identity vlan-link {
base ncs:plan-component-type;
}
identity dev-setup {
base ncs:plan-state;
}
ncs:plan-outline link:link-plan {
description
"Make before brake vlan plan";
ncs:component-type "link:vlan-link" {
ncs:state "ncs:init";
ncs:state "link:dev-setup" {
ncs:create {
ncs:nano-callback;
}
}
ncs:state "ncs:ready" {
ncs:create {
ncs:pre-condition {
ncs:monitor "$SERVICE/endpoints" {
ncs:trigger-expr "test-passed = 'true'";
}
}
}
ncs:delete {
ncs:pre-condition {
ncs:monitor "$SERVICE/plan" {
ncs:trigger-expr
"component[type = 'vlan-link'][back-track = 'false']"
+ "/state[name = 'ncs:ready'][status = 'reached']"
+ " or not(component[back-track = 'false'])";
}
}
}
}
}
}In the plan definition, note that there is only one nano service callback registered for the service. This callback is defined for the "link:dev-setup" state in the "link:vlan-link" component type. In the plan, it is represented as follows:
ncs:state "link:dev-setup" {
ncs:create {
ncs:nano-callback;
}
}
The callback is a template. You can find it under
packages/link/templates as link-template.xml.
For the state "ncs:ready in the "link:vlan-link" component type there are both a create and a delete pre-condition. The create pre-condition for this state is as follows:
ncs:create {
ncs:pre-condition {
ncs:monitor "$SERVICE/endpoints" {
ncs:trigger-expr "test-passed = 'true'";
}
}
}This pre-condition implies that the components based on this component type are not considered finished until the test-passed leaf is set to a "true" value. The pre-condition implements the requirement that after the initial setup of a link configured by the "link:dev-setup" state, a manual test and setting of the test-passed leaf is performed before the link is considered finished.
The delete pre-condition for the same state is as follows:
ncs:delete {
ncs:pre-condition {
ncs:monitor "$SERVICE/plan" {
ncs:trigger-expr
"component[type = 'vlan-link'][back-track = 'false']"
+ "/state[name = 'ncs:ready'][status = 'reached']"
+ " or not(component[back-track = 'false'])";
}
}
}
This pre-condition implies that before you start deleting
(back-tracking) an old component, the new component must
have reached the "ncs:ready" state, that is, after being
successfully tested.
The first part of the pre-condition checks the status of the
vlan-link components. Since there can be at most one link configured
in the service instance, the only non-backtracking component, other
than self, is the new link component.
However, that condition on its own prevents the component to be
deleted when deleting the service. So, the second part, after the
or statement, checks if all components are back-tracking,
which signifies service deletion.
This approach illustrates a "create-before-break" scenario where the
new link is created first, and only when it is set up, the old one
is removed.
ncs:service-behavior-tree link-servicepoint {
description
"Make before brake vlan example";
ncs:plan-outline-ref "link:link-plan";
ncs:selector {
ncs:multiplier {
ncs:foreach "endpoints" {
ncs:variable "VALUE" {
ncs:value-expr "concat(a-device, '-', a-interface,
'-', b-device, '-', b-interface)";
}
}
ncs:create-component "$VALUE" {
ncs:component-type-ref "link:vlan-link";
}
}
}The the ncs:service-behavior-tree is registered on the servicepoint "link-servicepoint" that is defined by the nano service. It refers to the plan definition named "link:link-plan". The behavior tree has a selector on top, which chooses to synthesize its children depending on their pre-conditions. In this tree, there are no pre-conditions, so all children will be synthesized.
The "multiplier" control node chooses a node-set. A variable named VALUE is created with a unique value for each node in that node-set and creates a component of the "link:vlan-link" type for each node in the chosen node-set. The name for each individual component is the value of the variable VALUE.
Since the chosen node-set is the "endpoints" list that can contain at most one element, it produces only one component. However, if the link in the service is changed, that is, the old list entry is deleted and a new one is created, then the multiplier creates a component with a new name.
This forces the old component (which is no longer synthesized) to be back-tracked and the plan definition above handles the "create-before-break" behavior of the back-tracking.
To run the example, do the following:
Build the example:
$cd examples.ncs/getting-started/developing-with-ncs/20-nano-services$make all
Start the example:
$cd ncs-netsim restart$ncs
Run the example:
$ncs_cli -C -u adminadmin@ncs(config)#devices sync-fromsync-result { device ex0 result true } sync-result { device ex1 result true } sync-result { device ex2 result true } admin@ncs(config)#configEntering configuration mode terminal
Now you create a service that sets up a VPN link between devices ex1 and ex2, and is completed immediately since the test-passed leaf is set to true.
admin@ncs(config)#link t2 unit 17 vlan-id 1admin@ncs(config-link-t2)#link t2 endpoints ex1 eth0 ex2 eth0 test-passed trueadmin@ncs(config-endpoints-ex1/eth0/ex2/eth0)#commitadmin@ncs(config-endpoints-ex1/eth0/ex2/eth0)#top
You can inspect the result of the commit:
admin@ncs(config)#exitadmin@ncs#link t2 get-modificationscli devices { device ex1 { config { r:sys { interfaces { interface eth0 { + unit 17 { + vlan-id 1; + } } } } } } device ex2 { config { r:sys { interfaces { interface eth0 { + unit 17 { + vlan-id 1; + } } } } } } }
The service sets up the link between the devices. Inspect the plan:
admin@ncs# show link t2 plan component * state * status
NAME STATE STATUS
---------------------------------------
self init reached
ready reached
ex1-eth0-ex2-eth0 init reached
dev-setup reached
ready reachedAll components in the plan have reached their ready state.
Now, change the link by changing the interface on one of the devices. To do this, you must remove the old list entry in "endpoints" and create a new one.
admin@ncs#configEntering configuration mode terminal admin@ncs(config)#no link t2 endpoints ex1 eth0 ex2 eth0admin@ncs(config)#link t2 endpoints ex1 eth0 ex2 eth1
Commit dry-run to inspect what happens:
admin@ncs(config-endpoints-ex1/eth0/ex2/eth1)# commit dry-run
cli devices {
device ex1 {
config {
r:sys {
interfaces {
interface eth0 {
}
}
}
}
}
device ex2 {
config {
r:sys {
interfaces {
+ interface eth1 {
+ unit 17 {
+ vlan-id 1;
+ }
+ }
}
}
}
}
}
link t2 {
- endpoints ex1 eth0 ex2 eth0 {
- test-passed true;
- }
+ endpoints ex1 eth0 ex2 eth1 {
+ }
}Upon committing, the service just adds the new interface and does not remove anything at this point. The reason is that the test-passed leaf is not set to "true" for the new component. Commit this change and inspect the plan:
admin@ncs(config-endpoints-ex1/eth0/ex2/eth1)#commitadmin@ncs(config-endpoints-ex1/eth0/ex2/eth1)#topadmin@ncs(config)#exitadmin@ncs#show link t2 plan... BACK ... NAME TYPE TRACK GOAL STATE STATUS ... -------------------------------------------------------------------... self self false - init reached ... ready reached ... ex1-eth0-ex2-eth1 vlan-link false - init reached ... dev-setup reached ... ready not-reached ... ex1-eth0-ex2-eth0 vlan-link true - init reached ... dev-setup reached ... ready reached ...
Notice that the new component "ex1-eth0-ex2-eth1" has not reached its ready state yet. Therefore, the old component "ex1-eth0-ex2-eth0" still exists in back-track mode but is still waiting for the new component to finish.
If you check what the service has configured at this point, you get the following:
admin@ncs# link t2 get-modifications
cli devices {
device ex1 {
config {
r:sys {
interfaces {
interface eth0 {
+ unit 17 {
+ vlan-id 1;
+ }
}
}
}
}
}
device ex2 {
config {
r:sys {
interfaces {
interface eth0 {
+ unit 17 {
+ vlan-id 1;
+ }
}
+ interface eth1 {
+ unit 17 {
+ vlan-id 1;
+ }
+ }
}
}
}
}
}Both the old and the new link exist at this point. Now, set the test-passed leaf to true to force the new component to reach its ready state.
admin@ncs(config)#link t2 endpoints ex1 eth0 ex2 eth1 test-passed trueadmin@ncs(config-endpoints-ex1/eth0/ex2/eth1)#commit
If you now check the service plan, you see the following:
admin@ncs(config-endpoints-ex1/eth0/ex2/eth1)#topadmin@ncs(config)#exitadmin@ncs#show link t2 plan... BACK ... NAME TYPE TRACK GOAL STATE STATUS ... ---------------------------------------------------------------... self self false - init reached ... ready reached ... ex1-eth0-ex2-eth1 vlan-link false - init reached ... dev-setup reached ... ready reached ...
The old component has been completely back-tracked and is removed because the new component is finished. You should also check the service modifications. You should see that the old link endpoint is removed:
admin@ncs# link t2 get-modifications
cli devices {
device ex1 {
config {
r:sys {
interfaces {
interface eth0 {
+ unit 17 {
+ vlan-id 1;
+ }
}
}
}
}
}
device ex2 {
config {
r:sys {
interfaces {
+ interface eth1 {
+ unit 17 {
+ vlan-id 1;
+ }
+ }
}
}
}
}
}